Simulation d’une corde qui chute#
La corde chute jusqu’à sa stabilisation autour d’une position d’équilibre.
L’étude physique est détaillée dans le document.
La corde est représentée par une suite de n masses ponctuelles reliées par des ressorts
de masse nulle qui exercent une traction lorsque leur longueur dépasse un certain seuil.
On considère une corde de longueur L et de masse M, elle est divisée en
n masses de masses  . Ces masses sont reliées par n-1 ressorts
qui exercent une traction sur les masses qu’ils relient lorsque leur
longueur dépasse le seuil
. Ces masses sont reliées par n-1 ressorts
qui exercent une traction sur les masses qu’ils relient lorsque leur
longueur dépasse le seuil  . Les masses sont initialement
placées sur une droite reliant les deux extremités fixes de la corde.
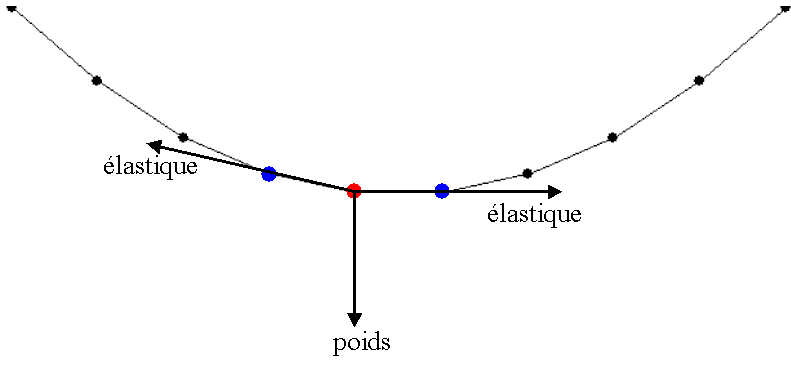
Chaque masse est soumis à une accélération égale à la somme de trois
forces qui sont son poids et les tractions exercées par les ressorts
auxquels elle est attachée
. Les masses sont initialement
placées sur une droite reliant les deux extremités fixes de la corde.
Chaque masse est soumis à une accélération égale à la somme de trois
forces qui sont son poids et les tractions exercées par les ressorts
auxquels elle est attachée
A chaque instant t, on peut calculer cette accélération, en déduire la vitesse puis la position à l’instant t+1. Ce mécanisme permet d’obtenir une animation de la corde atteignant sa position d’équilibre.
Le même code légèrement modifié peut également simuler un pendule.
On construit l’algorithme suivant étant donné une corde de longueur L
suspendue entre les points d’abscisse  et
et  de telle sorte que
de telle sorte que  . Cette corde à une masse M et une
raideur k. La pesanteur est notée g. On divise cette corde en n
masses ponctuelles de masse
. Cette corde à une masse M et une
raideur k. La pesanteur est notée g. On divise cette corde en n
masses ponctuelles de masse ![\forall i \in [[1..n]], \; m_i = \frac{M}{n}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuNi4xIC0tPgo8c3ZnIGhlaWdodD0nMTQuMjc1OTk0cHQnIHZlcnNpb249JzEuMScgdmlld0JveD0nNTYuNDEzMjY3IDU1LjYwMDA2MyAxMDUuNzA2NjI0IDE0LjI3NTk5NCcgd2lkdGg9JzEwNS43MDY2MjRwdCcgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluayc+CjxkZWZzPgo8cGF0aCBkPSdNNy43Mzg5NzkgLTQuNzk4MDA3QzcuODE4NjggLTUuMTA4ODQyIDcuODM0NjIgLTUuMTgwNTczIDguMzkyNTI4IC01LjE4MDU3M0M4LjU3NTg0MSAtNS4xODA1NzMgOC42NzE0ODIgLTUuMTgwNTczIDguNjcxNDgyIC01LjMzMjAwNUM4LjY3MTQ4MiAtNS40NDM1ODcgOC41Njc4NyAtNS40NDM1ODcgOC40MjQ0MDggLTUuNDQzNTg3SDcuMzk2MjY0QzcuMTgxMDcxIC01LjQ0MzU4NyA3LjE1NzE2MSAtNS40NDM1ODcgNy4wNTM1NDkgLTUuMjg0MTg0TDQuMDQ4ODE3IC0wLjczMzI1TDMuMzM5NDc3IC01LjIyODM5NEMzLjMwNzU5NyAtNS40Mjc2NDYgMy4yOTk2MjYgLTUuNDQzNTg3IDMuMDYwNTIzIC01LjQ0MzU4N0gxLjk4NDU1OEMxLjg0MTA5NiAtNS40NDM1ODcgMS43Mzc0ODQgLTUuNDQzNTg3IDEuNzM3NDg0IC01LjI5MjE1NEMxLjczNzQ4NCAtNS4xODA1NzMgMS44NDEwOTYgLTUuMTgwNTczIDEuOTY4NjE4IC01LjE4MDU3M0MyLjIzMTYzMSAtNS4xODA1NzMgMi40NjI3NjUgLTUuMTgwNTczIDIuNDYyNzY1IC01LjA1MzA1MUMyLjQ2Mjc2NSAtNS4wMjExNzEgMi40NTQ3OTUgLTUuMDEzMiAyLjQzMDg4NCAtNC45MDk1ODlMMS40MTg2OCAtMC44NTI4MDJDMS4zMjMwMzkgLTAuNDU0Mjk2IDEuMTE1ODE2IC0wLjI3ODk1NCAwLjU4MTgxOCAtMC4yNjMwMTRDMC41MzM5OTggLTAuMjYzMDE0IDAuNDM4MzU2IC0wLjI1NTA0NCAwLjQzODM1NiAtMC4xMTE1ODJDMC40MzgzNTYgLTAuMDYzNzYxIDAuNDc4MjA3IDAgMC41NTc5MDggMEMwLjU4OTc4OCAwIDAuNzczMTAxIC0wLjAyMzkxIDEuMzQ2OTQ5IC0wLjAyMzkxQzEuOTc2NTg4IC0wLjAyMzkxIDIuMDk2MTM5IDAgMi4xNjc4NyAwQzIuMTk5NzUxIDAgMi4zMTkzMDMgMCAyLjMxOTMwMyAtMC4xNTE0MzJDMi4zMTkzMDMgLTAuMjQ3MDczIDIuMjMxNjMxIC0wLjI2MzAxNCAyLjE3NTg0MSAtMC4yNjMwMTRDMS44ODg5MTcgLTAuMjcwOTg0IDEuNjQ5ODEzIC0wLjMxODgwNCAxLjY0OTgxMyAtMC41OTc3NThDMS42NDk4MTMgLTAuNjM3NjA5IDEuNjczNzI0IC0wLjc0OTE5MSAxLjY3MzcyNCAtMC43NTcxNjFMMi43NTc2NTkgLTUuMDg0OTMySDIuNzY1NjI5TDMuNTM4NzMgLTAuMjE1MTkzQzMuNTYyNjQgLTAuMDg3NjcxIDMuNTcwNjEgMCAzLjY4MjE5MiAwUzMuODQ5NTY0IC0wLjA4NzY3MSAzLjg5NzM4NSAtMC4xNTk0MDJMNy4xNzMxMDEgLTUuMTQ4NjkyTDcuMTgxMDcxIC01LjE0MDcyMkw2LjA1NzI4NSAtMC42Mjk2MzlDNS45ODU1NTQgLTAuMzI2Nzc1IDUuOTY5NjE0IC0wLjI2MzAxNCA1LjM3OTgyNiAtMC4yNjMwMTRDNS4yMjgzOTQgLTAuMjYzMDE0IDUuMTMyNzUyIC0wLjI2MzAxNCA1LjEzMjc1MiAtMC4xMTE1ODJDNS4xMzI3NTIgLTAuMDc5NzAxIDUuMTU2NjYzIDAgNS4yNjAyNzQgMFM1LjYwMjk4OSAtMC4wMTU5NCA1LjcxNDU3IC0wLjAyMzkxSDYuMjI0NjU4QzYuOTY1ODc4IC0wLjAyMzkxIDcuMTU3MTYxIDAgNy4yMTI5NTEgMEM3LjI2MDc3MiAwIDcuMzcyMzU0IDAgNy4zNzIzNTQgLTAuMTUxNDMyQzcuMzcyMzU0IC0wLjI2MzAxNCA3LjI2ODc0MiAtMC4yNjMwMTQgNy4xMzMyNSAtMC4yNjMwMTRDNy4xMDkzNCAtMC4yNjMwMTQgNi45NjU4NzggLTAuMjYzMDE0IDYuODMwMzg2IC0wLjI3ODk1NEM2LjY2MzAxNCAtMC4yOTQ4OTQgNi42NDcwNzMgLTAuMzE4ODA0IDYuNjQ3MDczIC0wLjM5MDUzNUM2LjY0NzA3MyAtMC40MzAzODYgNi42NjMwMTQgLTAuNDc4MjA3IDYuNjcwOTg0IC0wLjUxODA1N0w3LjczODk3OSAtNC43OTgwMDdaJyBpZD0nZzEtNzcnLz4KPHBhdGggZD0nTTIuMzc1MDkzIC00Ljk3MzM1QzIuMzc1MDkzIC01LjE0ODY5MiAyLjI0NzU3MiAtNS4yNzYyMTQgMi4wNjQyNTkgLTUuMjc2MjE0QzEuODU3MDM2IC01LjI3NjIxNCAxLjYyNTkwMyAtNS4wODQ5MzIgMS42MjU5MDMgLTQuODQ1ODI4QzEuNjI1OTAzIC00LjY3MDQ4NiAxLjc1MzQyNSAtNC41NDI5NjQgMS45MzY3MzcgLTQuNTQyOTY0QzIuMTQzOTYgLTQuNTQyOTY0IDIuMzc1MDkzIC00LjczNDI0NyAyLjM3NTA5MyAtNC45NzMzNVpNMS4yMTE0NTcgLTIuMDQ4MzE5TDAuNzgxMDcxIC0wLjk0ODQ0M0MwLjc0MTIyIC0wLjgyODg5MiAwLjcwMTM3IC0wLjczMzI1IDAuNzAxMzcgLTAuNTk3NzU4QzAuNzAxMzcgLTAuMjA3MjIzIDEuMDA0MjM0IDAuMDc5NzAxIDEuNDI2NjUgMC4wNzk3MDFDMi4xOTk3NTEgMC4wNzk3MDEgMi41MjY1MjYgLTEuMDM2MTE1IDIuNTI2NTI2IC0xLjEzOTcyNkMyLjUyNjUyNiAtMS4yMTk0MjcgMi40NjI3NjUgLTEuMjQzMzM3IDIuNDA2OTc0IC0xLjI0MzMzN0MyLjMxMTMzMyAtMS4yNDMzMzcgMi4yOTUzOTIgLTEuMTg3NTQ3IDIuMjcxNDgyIC0xLjEwNzg0NkMyLjA4ODE2OSAtMC40NzAyMzcgMS43NjEzOTUgLTAuMTQzNDYyIDEuNDQyNTkgLTAuMTQzNDYyQzEuMzQ2OTQ5IC0wLjE0MzQ2MiAxLjI1MTMwOCAtMC4xODMzMTMgMS4yNTEzMDggLTAuMzk4NTA2QzEuMjUxMzA4IC0wLjU4OTc4OCAxLjMwNzA5OCAtMC43MzMyNSAxLjQxMDcxIC0wLjk4MDMyNEMxLjQ5MDQxMSAtMS4xOTU1MTcgMS41NzAxMTIgLTEuNDEwNzEgMS42NTc3ODMgLTEuNjI1OTAzTDEuOTA0ODU3IC0yLjI3MTQ4MkMxLjk3NjU4OCAtMi40NTQ3OTUgMi4wNzIyMjkgLTIuNzAxODY4IDIuMDcyMjI5IC0yLjgzNzM2QzIuMDcyMjI5IC0zLjIzNTg2NiAxLjc1MzQyNSAtMy41MTQ4MTkgMS4zNDY5NDkgLTMuNTE0ODE5QzAuNTczODQ4IC0zLjUxNDgxOSAwLjIzOTEwMyAtMi4zOTkwMDQgMC4yMzkxMDMgLTIuMjk1MzkyQzAuMjM5MTAzIC0yLjIyMzY2MSAwLjI5NDg5NCAtMi4xOTE3ODEgMC4zNTg2NTUgLTIuMTkxNzgxQzAuNDYyMjY3IC0yLjE5MTc4MSAwLjQ3MDIzNyAtMi4yMzk2MDEgMC40OTQxNDcgLTIuMzE5MzAzQzAuNzE3MzEgLTMuMDc2NDYzIDEuMDgzOTM1IC0zLjI5MTY1NiAxLjMyMzAzOSAtMy4yOTE2NTZDMS40MzQ2MiAtMy4yOTE2NTYgMS41MTQzMjEgLTMuMjUxODA2IDEuNTE0MzIxIC0zLjAyODY0M0MxLjUxNDMyMSAtMi45NDg5NDEgMS41MDYzNTEgLTIuODM3MzYgMS40MjY2NSAtMi41OTgyNTdMMS4yMTE0NTcgLTIuMDQ4MzE5WicgaWQ9J2cxLTEwNScvPgo8cGF0aCBkPSdNMS41OTQwMjIgLTEuMzA3MDk4QzEuNjE3OTMzIC0xLjQyNjY1IDEuNjk3NjM0IC0xLjcyOTUxNCAxLjcyMTU0NCAtMS44NDkwNjZDMS44MzMxMjYgLTIuMjc5NDUyIDEuODMzMTI2IC0yLjI4NzQyMiAyLjAxNjQzOCAtMi41NTA0MzZDMi4yNzk0NTIgLTIuOTQwOTcxIDIuNjU0MDQ3IC0zLjI5MTY1NiAzLjE4ODA0NSAtMy4yOTE2NTZDMy40NzQ5NjkgLTMuMjkxNjU2IDMuNjQyMzQxIC0zLjEyNDI4NCAzLjY0MjM0MSAtMi43NDk2ODlDMy42NDIzNDEgLTIuMzExMzMzIDMuMzA3NTk3IC0xLjQwMjc0IDMuMTU2MTY0IC0xLjAxMjIwNEMzLjA1MjU1MyAtMC43NDkxOTEgMy4wNTI1NTMgLTAuNzAxMzcgMy4wNTI1NTMgLTAuNTk3NzU4QzMuMDUyNTUzIC0wLjE0MzQ2MiAzLjQyNzE0OCAwLjA3OTcwMSAzLjc2OTg2MyAwLjA3OTcwMUM0LjU1MDkzNCAwLjA3OTcwMSA0Ljg3NzcwOSAtMS4wMzYxMTUgNC44Nzc3MDkgLTEuMTM5NzI2QzQuODc3NzA5IC0xLjIxOTQyNyA0LjgxMzk0OCAtMS4yNDMzMzcgNC43NTgxNTcgLTEuMjQzMzM3QzQuNjYyNTE2IC0xLjI0MzMzNyA0LjY0NjU3NSAtMS4xODc1NDcgNC42MjI2NjUgLTEuMTA3ODQ2QzQuNDMxMzgyIC0wLjQ1NDI5NiA0LjA5NjYzOCAtMC4xNDM0NjIgMy43OTM3NzMgLTAuMTQzNDYyQzMuNjY2MjUyIC0wLjE0MzQ2MiAzLjYwMjQ5MSAtMC4yMjMxNjMgMy42MDI0OTEgLTAuNDA2NDc2UzMuNjY2MjUyIC0wLjc2NTEzMSAzLjc0NTk1MyAtMC45NjQzODRDMy44NjU1MDQgLTEuMjY3MjQ4IDQuMjE2MTg5IC0yLjE4MzgxMSA0LjIxNjE4OSAtMi42MzAxMzdDNC4yMTYxODkgLTMuMjI3ODk1IDMuODAxNzQzIC0zLjUxNDgxOSAzLjIyNzg5NSAtMy41MTQ4MTlDMi41ODIzMTYgLTMuNTE0ODE5IDIuMTY3ODcgLTMuMTI0Mjg0IDEuOTM2NzM3IC0yLjgyMTQyQzEuODgwOTQ2IC0zLjI1OTc3NiAxLjUzMDI2MiAtMy41MTQ4MTkgMS4xMjM3ODYgLTMuNTE0ODE5QzAuODM2ODYyIC0zLjUxNDgxOSAwLjYzNzYwOSAtMy4zMzE1MDcgMC41MTAwODcgLTMuMDg0NDMzQzAuMzE4ODA0IC0yLjcwOTgzOCAwLjIzOTEwMyAtMi4zMTEzMzMgMC4yMzkxMDMgLTIuMjk1MzkyQzAuMjM5MTAzIC0yLjIyMzY2MSAwLjI5NDg5NCAtMi4xOTE3ODEgMC4zNTg2NTUgLTIuMTkxNzgxQzAuNDYyMjY3IC0yLjE5MTc4MSAwLjQ3MDIzNyAtMi4yMjM2NjEgMC41MjYwMjcgLTIuNDMwODg0QzAuNjIxNjY5IC0yLjgyMTQyIDAuNzY1MTMxIC0zLjI5MTY1NiAxLjA5OTg3NSAtMy4yOTE2NTZDMS4zMDcwOTggLTMuMjkxNjU2IDEuMzU0OTE5IC0zLjA5MjQwMyAxLjM1NDkxOSAtMi45MTcwNjFDMS4zNTQ5MTkgLTIuNzczNTk5IDEuMzE1MDY4IC0yLjYyMjE2NyAxLjI1MTMwOCAtMi4zNTkxNTNDMS4yMzUzNjcgLTIuMjk1MzkyIDEuMTE1ODE2IC0xLjgyNTE1NiAxLjA4MzkzNSAtMS43MTM1NzRMMC43ODkwNDEgLTAuNTE4MDU3QzAuNzU3MTYxIC0wLjM5ODUwNiAwLjcwOTM0IC0wLjE5OTI1MyAwLjcwOTM0IC0wLjE2NzM3MkMwLjcwOTM0IDAuMDE1OTQgMC44NjA3NzIgMC4wNzk3MDEgMC45NjQzODQgMC4wNzk3MDFDMS4xMDc4NDYgMC4wNzk3MDEgMS4yMjczOTcgLTAuMDE1OTQgMS4yODMxODggLTAuMTExNTgyQzEuMzA3MDk4IC0wLjE1OTQwMiAxLjM3MDg1OSAtMC40MzAzODYgMS40MTA3MSAtMC41OTc3NThMMS41OTQwMjIgLTEuMzA3MDk4WicgaWQ9J2cxLTExMCcvPgo8cGF0aCBkPSdNMy40NDMwODggLTcuNjYzMjYzQzMuNDQzMDg4IC03LjkzODIzMiAzLjQ0MzA4OCAtNy45NTAxODcgMy4yMDM5ODUgLTcuOTUwMTg3QzIuOTE3MDYxIC03LjYyNzM5NyAyLjMxOTMwMyAtNy4xODUwNTYgMS4wODc5MiAtNy4xODUwNTZWLTYuODM4MzU2QzEuMzYyODg5IC02LjgzODM1NiAxLjk2MDY0OCAtNi44MzgzNTYgMi42MTgxODIgLTcuMTQ5MTkxVi0wLjkyMDU0OEMyLjYxODE4MiAtMC40OTAxNjIgMi41ODIzMTYgLTAuMzQ2NyAxLjUzMDI2MiAtMC4zNDY3SDEuMTU5NjUxVjBDMS40ODI0NDEgLTAuMDIzOTEgMi42NDIwOTIgLTAuMDIzOTEgMy4wMzY2MTMgLTAuMDIzOTFTNC41Nzg4MjkgLTAuMDIzOTEgNC45MDE2MTkgMFYtMC4zNDY3SDQuNTMxMDA5QzMuNDc4OTU0IC0wLjM0NjcgMy40NDMwODggLTAuNDkwMTYyIDMuNDQzMDg4IC0wLjkyMDU0OFYtNy42NjMyNjNaJyBpZD0nZzMtNDknLz4KPHBhdGggZD0nTTguMDY5NzM4IC0zLjg3MzQ3NEM4LjIzNzExMSAtMy44NzM0NzQgOC40NTIzMDQgLTMuODczNDc0IDguNDUyMzA0IC00LjA4ODY2N0M4LjQ1MjMwNCAtNC4zMTU4MTYgOC4yNDkwNjYgLTQuMzE1ODE2IDguMDY5NzM4IC00LjMxNTgxNkgxLjAyODE0NEMwLjg2MDc3MiAtNC4zMTU4MTYgMC42NDU1NzkgLTQuMzE1ODE2IDAuNjQ1NTc5IC00LjEwMDYyM0MwLjY0NTU3OSAtMy44NzM0NzQgMC44NDg4MTcgLTMuODczNDc0IDEuMDI4MTQ0IC0zLjg3MzQ3NEg4LjA2OTczOFpNOC4wNjk3MzggLTEuNjQ5ODEzQzguMjM3MTExIC0xLjY0OTgxMyA4LjQ1MjMwNCAtMS42NDk4MTMgOC40NTIzMDQgLTEuODY1MDA2QzguNDUyMzA0IC0yLjA5MjE1NCA4LjI0OTA2NiAtMi4wOTIxNTQgOC4wNjk3MzggLTIuMDkyMTU0SDEuMDI4MTQ0QzAuODYwNzcyIC0yLjA5MjE1NCAwLjY0NTU3OSAtMi4wOTIxNTQgMC42NDU1NzkgLTEuODc2OTYxQzAuNjQ1NTc5IC0xLjY0OTgxMyAwLjg0ODgxNyAtMS42NDk4MTMgMS4wMjgxNDQgLTEuNjQ5ODEzSDguMDY5NzM4WicgaWQ9J2czLTYxJy8+CjxwYXRoIGQ9J00yLjk4ODc5MiAyLjk4ODc5MlYyLjU0NjQ1MUgxLjgyOTE0MVYtOC41MjQwMzVIMi45ODg3OTJWLTguOTY2Mzc2SDEuMzg2OFYyLjk4ODc5MkgyLjk4ODc5MlonIGlkPSdnMy05MScvPgo8cGF0aCBkPSdNMS44NTMwNTEgLTguOTY2Mzc2SDAuMjUxMDU5Vi04LjUyNDAzNUgxLjQxMDcxVjIuNTQ2NDUxSDAuMjUxMDU5VjIuOTg4NzkySDEuODUzMDUxVi04Ljk2NjM3NlonIGlkPSdnMy05MycvPgo8cGF0aCBkPSdNNi41NTE0MzIgLTIuNzQ5Njg5QzYuNzU0NjcgLTIuNzQ5Njg5IDYuOTY5ODYzIC0yLjc0OTY4OSA2Ljk2OTg2MyAtMi45ODg3OTJTNi43NTQ2NyAtMy4yMjc4OTUgNi41NTE0MzIgLTMuMjI3ODk1SDEuNDgyNDQxQzEuNjI1OTAzIC00LjgyOTg4OCAzLjAwMDc0NyAtNS45Nzc1ODQgNC42ODY0MjYgLTUuOTc3NTg0SDYuNTUxNDMyQzYuNzU0NjcgLTUuOTc3NTg0IDYuOTY5ODYzIC01Ljk3NzU4NCA2Ljk2OTg2MyAtNi4yMTY2ODdTNi43NTQ2NyAtNi40NTU3OTEgNi41NTE0MzIgLTYuNDU1NzkxSDQuNjYyNTE2QzIuNjE4MTgyIC02LjQ1NTc5MSAwLjk5MjI3OSAtNC45MDE2MTkgMC45OTIyNzkgLTIuOTg4NzkyUzIuNjE4MTgyIDAuNDc4MjA3IDQuNjYyNTE2IDAuNDc4MjA3SDYuNTUxNDMyQzYuNzU0NjcgMC40NzgyMDcgNi45Njk4NjMgMC40NzgyMDcgNi45Njk4NjMgMC4yMzkxMDNTNi43NTQ2NyAwIDYuNTUxNDMyIDBINC42ODY0MjZDMy4wMDA3NDcgMCAxLjYyNTkwMyAtMS4xNDc2OTYgMS40ODI0NDEgLTIuNzQ5Njg5SDYuNTUxNDMyWicgaWQ9J2cwLTUwJy8+CjxwYXRoIGQ9J002LjU4NzI5OCAtNy44NDI1OUM2LjY0NzA3MyAtNy45NzQwOTcgNi42NDcwNzMgLTcuOTk4MDA3IDYuNjQ3MDczIC04LjA1Nzc4M0M2LjY0NzA3MyAtOC4xNzczMzUgNi41NTE0MzIgLTguMjk2ODg3IDYuNDA3OTcgLTguMjk2ODg3QzYuMjUyNTUzIC04LjI5Njg4NyA2LjE4MDgyMiAtOC4xNTM0MjUgNi4xMzMwMDEgLTguMDIxOTE4TDUuMTQwNzIyIC01LjM5MTc4MUgxLjUwNjM1MUwwLjUxNDA3MiAtOC4wMjE5MThDMC40NTQyOTYgLTguMTg5MjkgMC4zOTQ1MjEgLTguMjk2ODg3IDAuMjM5MTAzIC04LjI5Njg4N0MwLjExOTU1MiAtOC4yOTY4ODcgMCAtOC4xNzczMzUgMCAtOC4wNTc3ODNDMCAtOC4wMzM4NzMgMCAtOC4wMDk5NjMgMC4wNzE3MzEgLTcuODQyNTlMMy4wNDg1NjggLTAuMDExOTU1QzMuMTA4MzQ0IDAuMTU1NDE3IDMuMTY4MTIgMC4yNjMwMTQgMy4zMjM1MzcgMC4yNjMwMTRDMy40OTA5MDkgMC4yNjMwMTQgMy41Mzg3MyAwLjEzMTUwNyAzLjU4NjU1IDAuMDExOTU1TDYuNTg3Mjk4IC03Ljg0MjU5Wk0xLjY5NzYzNCAtNC45MTM1NzRINC45NDk0NEwzLjMyMzUzNyAtMC42NTc1MzRMMS42OTc2MzQgLTQuOTEzNTc0WicgaWQ9J2cwLTU2Jy8+CjxwYXRoIGQ9J00yLjE5OTc1MSAtMC41NzM4NDhDMi4xOTk3NTEgLTAuOTIwNTQ4IDEuOTEyODI3IC0xLjE1OTY1MSAxLjYyNTkwMyAtMS4xNTk2NTFDMS4yNzkyMDMgLTEuMTU5NjUxIDEuMDQwMSAtMC44NzI3MjcgMS4wNDAxIC0wLjU4NTgwM0MxLjA0MDEgLTAuMjM5MTAzIDEuMzI3MDI0IDAgMS42MTM5NDggMEMxLjk2MDY0OCAwIDIuMTk5NzUxIC0wLjI4NjkyNCAyLjE5OTc1MSAtMC41NzM4NDhaJyBpZD0nZzItNTgnLz4KPHBhdGggZD0nTTIuMzMxMjU4IDAuMDQ3ODIxQzIuMzMxMjU4IC0wLjY0NTU3OSAyLjEwNDExIC0xLjE1OTY1MSAxLjYxMzk0OCAtMS4xNTk2NTFDMS4yMzEzODIgLTEuMTU5NjUxIDEuMDQwMSAtMC44NDg4MTcgMS4wNDAxIC0wLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3IC0wLjA0NzgyMSAyLjAyMDQyMyAtMC4xNTU0MTdDMi4wNDQzMzQgLTAuMTc5MzI4IDIuMDU2Mjg5IC0wLjE3OTMyOCAyLjA2ODI0NCAtMC4xNzkzMjhDMi4wOTIxNTQgLTAuMTc5MzI4IDIuMDkyMTU0IC0wLjAxMTk1NSAyLjA5MjE1NCAwLjA0NzgyMUMyLjA5MjE1NCAwLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IDAuMDQ3ODIxWicgaWQ9J2cyLTU5Jy8+CjxwYXRoIGQ9J00zLjM4MzMxMyAtMS43MDk1ODlDMy4zODMzMTMgLTEuNzY5MzY1IDMuMzM1NDkyIC0xLjgxNzE4NiAzLjI2Mzc2MSAtMS44MTcxODZDMy4xNTYxNjQgLTEuODE3MTg2IDMuMTQ0MjA5IC0xLjc4MTMyIDMuMDg0NDMzIC0xLjU3ODA4MkMyLjc3MzU5OSAtMC40OTAxNjIgMi4yODM0MzcgLTAuMTE5NTUyIDEuODg4OTE3IC0wLjExOTU1MkMxLjc0NTQ1NSAtMC4xMTk1NTIgMS41NzgwODIgLTAuMTU1NDE3IDEuNTc4MDgyIC0wLjUxNDA3MkMxLjU3ODA4MiAtMC44MzY4NjIgMS43MjE1NDQgLTEuMTk1NTE3IDEuODUzMDUxIC0xLjU1NDE3MkwyLjY4OTkxMyAtMy43Nzc4MzNDMi43MjU3NzggLTMuODczNDc0IDIuODA5NDY1IC00LjA4ODY2NyAyLjgwOTQ2NSAtNC4zMTU4MTZDMi44MDk0NjUgLTQuODE3OTMzIDIuNDUwODA5IC01LjI3MjIyOSAxLjg2NTAwNiAtNS4yNzIyMjlDMC43NjUxMzEgLTUuMjcyMjI5IDAuMzIyNzkgLTMuNTM4NzMgMC4zMjI3OSAtMy40NDMwODhDMC4zMjI3OSAtMy4zOTUyNjggMC4zNzA2MSAtMy4zMzU0OTIgMC40NTQyOTYgLTMuMzM1NDkyQzAuNTYxODkzIC0zLjMzNTQ5MiAwLjU3Mzg0OCAtMy4zODMzMTMgMC42MjE2NjkgLTMuNTUwNjg1QzAuOTA4NTkzIC00LjU1NDkxOSAxLjM2Mjg4OSAtNS4wMzMxMjYgMS44MjkxNDEgLTUuMDMzMTI2QzEuOTM2NzM3IC01LjAzMzEyNiAyLjEzOTk3NSAtNS4wMjExNzEgMi4xMzk5NzUgLTQuNjM4NjA1QzIuMTM5OTc1IC00LjMyNzc3MSAxLjk4NDU1OCAtMy45MzMyNSAxLjg4ODkxNyAtMy42NzAyMzdMMS4wNTIwNTUgLTEuNDQ2NTc1QzAuOTgwMzI0IC0xLjI1NTI5MyAwLjkwODU5MyAtMS4wNjQwMSAwLjkwODU5MyAtMC44NDg4MTdDMC45MDg1OTMgLTAuMzEwODM0IDEuMjc5MjAzIDAuMTE5NTUyIDEuODUzMDUxIDAuMTE5NTUyQzIuOTUyOTI3IDAuMTE5NTUyIDMuMzgzMzEzIC0xLjYyNTkwMyAzLjM4MzMxMyAtMS43MDk1ODlaTTMuMjg3NjcxIC03LjQ2MDAyNUMzLjI4NzY3MSAtNy42MzkzNTIgMy4xNDQyMDkgLTcuODU0NTQ1IDIuODgxMTk2IC03Ljg1NDU0NUMyLjYwNjIyNyAtNy44NTQ1NDUgMi4yOTUzOTIgLTcuNTkxNTMyIDIuMjk1MzkyIC03LjI4MDY5N0MyLjI5NTM5MiAtNi45ODE4MTggMi41NDY0NTEgLTYuODg2MTc3IDIuNjg5OTEzIC02Ljg4NjE3N0MzLjAxMjcwMiAtNi44ODYxNzcgMy4yODc2NzEgLTcuMTk3MDExIDMuMjg3NjcxIC03LjQ2MDAyNVonIGlkPSdnMi0xMDUnLz4KPHBhdGggZD0nTTIuNDYyNzY1IC0zLjUwMjg2NEMyLjQ4NjY3NSAtMy41NzQ1OTUgMi43ODU1NTQgLTQuMTcyMzU0IDMuMjI3ODk1IC00LjU1NDkxOUMzLjUzODczIC00Ljg0MTg0MyAzLjk0NTIwNSAtNS4wMzMxMjYgNC40MTE0NTcgLTUuMDMzMTI2QzQuODg5NjY0IC01LjAzMzEyNiA1LjA1NzAzNiAtNC42NzQ0NzEgNS4wNTcwMzYgLTQuMTk2MjY0QzUuMDU3MDM2IC00LjEyNDUzMyA1LjA1NzAzNiAtMy44ODU0MyA0LjkxMzU3NCAtMy4zMjM1MzdMNC42MTQ2OTUgLTIuMDkyMTU0QzQuNTE5MDU0IC0xLjczMzQ5OSA0LjI5MTkwNSAtMC44NDg4MTcgNC4yNjc5OTUgLTAuNzE3MzFDNC4yMjAxNzQgLTAuNTM3OTgzIDQuMTQ4NDQzIC0wLjIyNzE0OCA0LjE0ODQ0MyAtMC4xNzkzMjhDNC4xNDg0NDMgLTAuMDExOTU1IDQuMjc5OTUgMC4xMTk1NTIgNC40NTkyNzggMC4xMTk1NTJDNC44MTc5MzMgMC4xMTk1NTIgNC44Nzc3MDkgLTAuMTU1NDE3IDQuOTg1MzA1IC0wLjU4NTgwM0w1LjcwMjYxNSAtMy40NDMwODhDNS43MjY1MjYgLTMuNTM4NzMgNi4zNDgxOTQgLTUuMDMzMTI2IDcuNjYzMjYzIC01LjAzMzEyNkM4LjE0MTQ2OSAtNS4wMzMxMjYgOC4zMDg4NDIgLTQuNjc0NDcxIDguMzA4ODQyIC00LjE5NjI2NEM4LjMwODg0MiAtMy41MjY3NzUgNy44NDI1OSAtMi4yMjM2NjEgNy41Nzk1NzcgLTEuNTA2MzUxQzcuNDcxOTggLTEuMjE5NDI3IDcuNDEyMjA0IC0xLjA2NDAxIDcuNDEyMjA0IC0wLjg0ODgxN0M3LjQxMjIwNCAtMC4zMTA4MzQgNy43ODI4MTQgMC4xMTk1NTIgOC4zNTY2NjMgMC4xMTk1NTJDOS40Njg0OTMgMC4xMTk1NTIgOS44ODY5MjQgLTEuNjM3ODU4IDkuODg2OTI0IC0xLjcwOTU4OUM5Ljg4NjkyNCAtMS43NjkzNjUgOS44MzkxMDMgLTEuODE3MTg2IDkuNzY3MzcyIC0xLjgxNzE4NkM5LjY1OTc3NiAtMS44MTcxODYgOS42NDc4MjEgLTEuNzgxMzIgOS41ODgwNDUgLTEuNTc4MDgyQzkuMzEzMDc2IC0wLjYyMTY2OSA4Ljg3MDczNSAtMC4xMTk1NTIgOC4zOTI1MjggLTAuMTE5NTUyQzguMjcyOTc2IC0wLjExOTU1MiA4LjA4MTY5NCAtMC4xMzE1MDcgOC4wODE2OTQgLTAuNTE0MDcyQzguMDgxNjk0IC0wLjgyNDkwNyA4LjIyNTE1NiAtMS4yMDc0NzIgOC4yNzI5NzYgLTEuMzM4OTc5QzguNDg4MTY5IC0xLjkxMjgyNyA5LjAyNjE1MiAtMy4zMjM1MzcgOS4wMjYxNTIgLTQuMDE2OTM2QzkuMDI2MTUyIC00LjczNDI0NyA4LjYwNzcyMSAtNS4yNzIyMjkgNy42OTkxMjggLTUuMjcyMjI5QzYuODk4MTMyIC01LjI3MjIyOSA2LjI1MjU1MyAtNC44MTc5MzMgNS43NzQzNDYgLTQuMTEyNTc4QzUuNzM4NDgxIC00Ljc1ODE1NyA1LjM0Mzk2IC01LjI3MjIyOSA0LjQ0NzMyMyAtNS4yNzIyMjlDMy4zODMzMTMgLTUuMjcyMjI5IDIuODIxNDIgLTQuNTE5MDU0IDIuNjA2MjI3IC00LjIyMDE3NEMyLjU3MDM2MSAtNC45MDE2MTkgMi4wODAxOTkgLTUuMjcyMjI5IDEuNTU0MTcyIC01LjI3MjIyOUMxLjIwNzQ3MiAtNS4yNzIyMjkgMC45MzI1MDMgLTUuMTA0ODU3IDAuNzA1MzU1IC00LjY1MDU2QzAuNDkwMTYyIC00LjIyMDE3NCAwLjMyMjc5IC0zLjQ5MDkwOSAwLjMyMjc5IC0zLjQ0MzA4OFMwLjM3MDYxIC0zLjMzNTQ5MiAwLjQ1NDI5NiAtMy4zMzU0OTJDMC41NDk5MzggLTMuMzM1NDkyIDAuNTYxODkzIC0zLjM0NzQ0NyAwLjYzMzYyNCAtMy42MjI0MTZDMC44MTI5NTEgLTQuMzI3NzcxIDEuMDQwMSAtNS4wMzMxMjYgMS41MTgzMDYgLTUuMDMzMTI2QzEuNzkzMjc1IC01LjAzMzEyNiAxLjg4ODkxNyAtNC44NDE4NDMgMS44ODg5MTcgLTQuNDgzMTg4QzEuODg4OTE3IC00LjIyMDE3NCAxLjc2OTM2NSAtMy43NTM5MjMgMS42ODU2NzkgLTMuMzgzMzEzTDEuMzUwOTM0IC0yLjA5MjE1NEMxLjMwMzExMyAtMS44NjUwMDYgMS4xNzE2MDYgLTEuMzI3MDI0IDEuMTExODMxIC0xLjExMTgzMUMxLjAyODE0NCAtMC44MDA5OTYgMC44OTY2MzggLTAuMjM5MTAzIDAuODk2NjM4IC0wLjE3OTMyOEMwLjg5NjYzOCAtMC4wMTE5NTUgMS4wMjgxNDQgMC4xMTk1NTIgMS4yMDc0NzIgMC4xMTk1NTJDMS4zNTA5MzQgMC4xMTk1NTIgMS41MTgzMDYgMC4wNDc4MjEgMS42MTM5NDggLTAuMTMxNTA3QzEuNjM3ODU4IC0wLjE5MTI4MyAxLjc0NTQ1NSAtMC42MDk3MTQgMS44MDUyMyAtMC44NDg4MTdMMi4wNjgyNDQgLTEuOTI0NzgyTDIuNDYyNzY1IC0zLjUwMjg2NFonIGlkPSdnMi0xMDknLz4KPHBhdGggZD0nTTIuNDYyNzY1IC0zLjUwMjg2NEMyLjQ4NjY3NSAtMy41NzQ1OTUgMi43ODU1NTQgLTQuMTcyMzU0IDMuMjI3ODk1IC00LjU1NDkxOUMzLjUzODczIC00Ljg0MTg0MyAzLjk0NTIwNSAtNS4wMzMxMjYgNC40MTE0NTcgLTUuMDMzMTI2QzQuODg5NjY0IC01LjAzMzEyNiA1LjA1NzAzNiAtNC42NzQ0NzEgNS4wNTcwMzYgLTQuMTk2MjY0QzUuMDU3MDM2IC0zLjUxNDgxOSA0LjU2Njg3NCAtMi4xNTE5MyA0LjMyNzc3MSAtMS41MDYzNTFDNC4yMjAxNzQgLTEuMjE5NDI3IDQuMTYwMzk5IC0xLjA2NDAxIDQuMTYwMzk5IC0wLjg0ODgxN0M0LjE2MDM5OSAtMC4zMTA4MzQgNC41MzEwMDkgMC4xMTk1NTIgNS4xMDQ4NTcgMC4xMTk1NTJDNi4yMTY2ODcgMC4xMTk1NTIgNi42MzUxMTggLTEuNjM3ODU4IDYuNjM1MTE4IC0xLjcwOTU4OUM2LjYzNTExOCAtMS43NjkzNjUgNi41ODcyOTggLTEuODE3MTg2IDYuNTE1NTY3IC0xLjgxNzE4NkM2LjQwNzk3IC0xLjgxNzE4NiA2LjM5NjAxNSAtMS43ODEzMiA2LjMzNjIzOSAtMS41NzgwODJDNi4wNjEyNyAtMC41OTc3NTggNS42MDY5NzQgLTAuMTE5NTUyIDUuMTQwNzIyIC0wLjExOTU1MkM1LjAyMTE3MSAtMC4xMTk1NTIgNC44Mjk4ODggLTAuMTMxNTA3IDQuODI5ODg4IC0wLjUxNDA3MkM0LjgyOTg4OCAtMC44MTI5NTEgNC45NjEzOTUgLTEuMTcxNjA2IDUuMDMzMTI2IC0xLjMzODk3OUM1LjI3MjIyOSAtMS45OTY1MTMgNS43NzQzNDYgLTMuMzM1NDkyIDUuNzc0MzQ2IC00LjAxNjkzNkM1Ljc3NDM0NiAtNC43MzQyNDcgNS4zNTU5MTUgLTUuMjcyMjI5IDQuNDQ3MzIzIC01LjI3MjIyOUMzLjM4MzMxMyAtNS4yNzIyMjkgMi44MjE0MiAtNC41MTkwNTQgMi42MDYyMjcgLTQuMjIwMTc0QzIuNTcwMzYxIC00LjkwMTYxOSAyLjA4MDE5OSAtNS4yNzIyMjkgMS41NTQxNzIgLTUuMjcyMjI5QzEuMTcxNjA2IC01LjI3MjIyOSAwLjkwODU5MyAtNS4wNDUwODEgMC43MDUzNTUgLTQuNjM4NjA1QzAuNDkwMTYyIC00LjIwODIxOSAwLjMyMjc5IC0zLjQ5MDkwOSAwLjMyMjc5IC0zLjQ0MzA4OFMwLjM3MDYxIC0zLjMzNTQ5MiAwLjQ1NDI5NiAtMy4zMzU0OTJDMC41NDk5MzggLTMuMzM1NDkyIDAuNTYxODkzIC0zLjM0NzQ0NyAwLjYzMzYyNCAtMy42MjI0MTZDMC44MjQ5MDcgLTQuMzUxNjgxIDEuMDQwMSAtNS4wMzMxMjYgMS41MTgzMDYgLTUuMDMzMTI2QzEuNzkzMjc1IC01LjAzMzEyNiAxLjg4ODkxNyAtNC44NDE4NDMgMS44ODg5MTcgLTQuNDgzMTg4QzEuODg4OTE3IC00LjIyMDE3NCAxLjc2OTM2NSAtMy43NTM5MjMgMS42ODU2NzkgLTMuMzgzMzEzTDEuMzUwOTM0IC0yLjA5MjE1NEMxLjMwMzExMyAtMS44NjUwMDYgMS4xNzE2MDYgLTEuMzI3MDI0IDEuMTExODMxIC0xLjExMTgzMUMxLjAyODE0NCAtMC44MDA5OTYgMC44OTY2MzggLTAuMjM5MTAzIDAuODk2NjM4IC0wLjE3OTMyOEMwLjg5NjYzOCAtMC4wMTE5NTUgMS4wMjgxNDQgMC4xMTk1NTIgMS4yMDc0NzIgMC4xMTk1NTJDMS4zNTA5MzQgMC4xMTk1NTIgMS41MTgzMDYgMC4wNDc4MjEgMS42MTM5NDggLTAuMTMxNTA3QzEuNjM3ODU4IC0wLjE5MTI4MyAxLjc0NTQ1NSAtMC42MDk3MTQgMS44MDUyMyAtMC44NDg4MTdMMi4wNjgyNDQgLTEuOTI0NzgyTDIuNDYyNzY1IC0zLjUwMjg2NFonIGlkPSdnMi0xMTAnLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzU2LjQxMzI2NycgeGxpbms6aHJlZj0nI2cwLTU2JyB5PSc2NS43NTM0MjUnLz4KPHVzZSB4PSc2My4wNTUwNDcnIHhsaW5rOmhyZWY9JyNnMi0xMDUnIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzcwLjM2OTMwOScgeGxpbms6aHJlZj0nI2cwLTUwJyB5PSc2NS43NTM0MjUnLz4KPHVzZSB4PSc4MS42NjAyNzcnIHhsaW5rOmhyZWY9JyNnMy05MScgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nODQuOTExOTM4JyB4bGluazpocmVmPScjZzMtOTEnIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9Jzg4LjE2MzYnIHhsaW5rOmhyZWY9JyNnMy00OScgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nOTQuMDE2NTknIHhsaW5rOmhyZWY9JyNnMi01OCcgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nOTcuMjY4MjUxJyB4bGluazpocmVmPScjZzItNTgnIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzEwMC41MTk5MTInIHhsaW5rOmhyZWY9JyNnMi0xMTAnIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzEwNy41MDc1MTgnIHhsaW5rOmhyZWY9JyNnMy05MycgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nMTEwLjc1OTE3OScgeGxpbms6aHJlZj0nI2czLTkzJyB5PSc2NS43NTM0MjUnLz4KPHVzZSB4PScxMTQuMDEwODQxJyB4bGluazpocmVmPScjZzItNTknIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzEyMi41NzU4MjknIHhsaW5rOmhyZWY9JyNnMi0xMDknIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzEzMi44MTUwOTYnIHhsaW5rOmhyZWY9JyNnMS0xMDUnIHk9JzY3LjU0NjY4OCcvPgo8dXNlIHg9JzEzOS41MTcxOTcnIHhsaW5rOmhyZWY9JyNnMy02MScgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nMTUzLjEzODE5MScgeGxpbms6aHJlZj0nI2cxLTc3JyB5PSc2MS4wNDYyOTknLz4KPHJlY3QgaGVpZ2h0PScwLjQ3ODE4Nycgd2lkdGg9JzguOTgxNjk5JyB4PScxNTMuMTM4MTkxJyB5PSc2Mi41MjU1MzknLz4KPHVzZSB4PScxNTUuMDU5OTQnIHhsaW5rOmhyZWY9JyNnMS0xMTAnIHk9JzY5Ljg3NjA1NycvPgo8L2c+Cjwvc3ZnPg==) .
Chaque masse a une position
.
Chaque masse a une position  . On note pour chaque point sa vitesse
. On note pour chaque point sa vitesse
 . On désigne par f un coefficient de freinage, plus il est grand,
plus la corde convergera rapidement vers sa position d’équilibre.
dt désigne un pas de temps.
. On désigne par f un coefficient de freinage, plus il est grand,
plus la corde convergera rapidement vers sa position d’équilibre.
dt désigne un pas de temps.
![\forall i \in [[1..n]], \; p_i = -x_0 + 2x_0 \frac{i-1}{n-1}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuNi4xIC0tPgo8c3ZnIGhlaWdodD0nMjUuMTIyMzgycHQnIHZlcnNpb249JzEuMScgdmlld0JveD0nMTQ2LjQ1MjI4NCA3OC43MDQ4NTcgMTcyLjE1MTQ5IDI1LjEyMjM4Micgd2lkdGg9JzE3Mi4xNTE0OXB0JyB4bWxucz0naHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmcnIHhtbG5zOnhsaW5rPSdodHRwOi8vd3d3LnczLm9yZy8xOTk5L3hsaW5rJz4KPGRlZnM+CjxwYXRoIGQ9J00zLjg5NzM4NSAtMi41NDI0NjZDMy44OTczODUgLTMuMzk1MjY4IDMuODA5NzE0IC0zLjkxMzMyNSAzLjU0NjcgLTQuNDIzNDEyQzMuMTk2MDE1IC01LjEyNDc4MiAyLjU1MDQzNiAtNS4zMDAxMjUgMi4xMTIwOCAtNS4zMDAxMjVDMS4xMDc4NDYgLTUuMzAwMTI1IDAuNzQxMjIgLTQuNTUwOTM0IDAuNjI5NjM5IC00LjMyNzc3MUMwLjM0MjcxNSAtMy43NDU5NTMgMC4zMjY3NzUgLTIuOTU2OTEyIDAuMzI2Nzc1IC0yLjU0MjQ2NkMwLjMyNjc3NSAtMi4wMTY0MzggMC4zNTA2ODUgLTEuMjExNDU3IDAuNzMzMjUgLTAuNTczODQ4QzEuMDk5ODc1IDAuMDE1OTQgMS42ODk2NjQgMC4xNjczNzIgMi4xMTIwOCAwLjE2NzM3MkMyLjQ5NDY0NSAwLjE2NzM3MiAzLjE4MDA3NSAwLjA0NzgyMSAzLjU3ODU4IC0wLjc0MTIyQzMuODczNDc0IC0xLjMxNTA2OCAzLjg5NzM4NSAtMi4wMjQ0MDggMy44OTczODUgLTIuNTQyNDY2Wk0yLjExMjA4IC0wLjA1NTc5MUMxLjg0MTA5NiAtMC4wNTU3OTEgMS4yOTExNTggLTAuMTgzMzEzIDEuMTIzNzg2IC0xLjAyMDE3NEMxLjAzNjExNSAtMS40NzQ0NzEgMS4wMzYxMTUgLTIuMjIzNjYxIDEuMDM2MTE1IC0yLjYzODEwN0MxLjAzNjExNSAtMy4xODgwNDUgMS4wMzYxMTUgLTMuNzQ1OTUzIDEuMTIzNzg2IC00LjE4NDMwOUMxLjI5MTE1OCAtNC45OTcyNiAxLjkxMjgyNyAtNS4wNzY5NjEgMi4xMTIwOCAtNS4wNzY5NjFDMi4zODMwNjQgLTUuMDc2OTYxIDIuOTMzMDAxIC00Ljk0MTQ2OSAzLjA5MjQwMyAtNC4yMTYxODlDMy4xODgwNDUgLTMuNzc3ODMzIDMuMTg4MDQ1IC0zLjE4MDA3NSAzLjE4ODA0NSAtMi42MzgxMDdDMy4xODgwNDUgLTIuMTY3ODcgMy4xODgwNDUgLTEuNDUwNTYgMy4wOTI0MDMgLTEuMDA0MjM0QzIuOTI1MDMxIC0wLjE2NzM3MiAyLjM3NTA5MyAtMC4wNTU3OTEgMi4xMTIwOCAtMC4wNTU3OTFaJyBpZD0nZzMtNDgnLz4KPHBhdGggZD0nTTIuMzc1MDkzIC00Ljk3MzM1QzIuMzc1MDkzIC01LjE0ODY5MiAyLjI0NzU3MiAtNS4yNzYyMTQgMi4wNjQyNTkgLTUuMjc2MjE0QzEuODU3MDM2IC01LjI3NjIxNCAxLjYyNTkwMyAtNS4wODQ5MzIgMS42MjU5MDMgLTQuODQ1ODI4QzEuNjI1OTAzIC00LjY3MDQ4NiAxLjc1MzQyNSAtNC41NDI5NjQgMS45MzY3MzcgLTQuNTQyOTY0QzIuMTQzOTYgLTQuNTQyOTY0IDIuMzc1MDkzIC00LjczNDI0NyAyLjM3NTA5MyAtNC45NzMzNVpNMS4yMTE0NTcgLTIuMDQ4MzE5TDAuNzgxMDcxIC0wLjk0ODQ0M0MwLjc0MTIyIC0wLjgyODg5MiAwLjcwMTM3IC0wLjczMzI1IDAuNzAxMzcgLTAuNTk3NzU4QzAuNzAxMzcgLTAuMjA3MjIzIDEuMDA0MjM0IDAuMDc5NzAxIDEuNDI2NjUgMC4wNzk3MDFDMi4xOTk3NTEgMC4wNzk3MDEgMi41MjY1MjYgLTEuMDM2MTE1IDIuNTI2NTI2IC0xLjEzOTcyNkMyLjUyNjUyNiAtMS4yMTk0MjcgMi40NjI3NjUgLTEuMjQzMzM3IDIuNDA2OTc0IC0xLjI0MzMzN0MyLjMxMTMzMyAtMS4yNDMzMzcgMi4yOTUzOTIgLTEuMTg3NTQ3IDIuMjcxNDgyIC0xLjEwNzg0NkMyLjA4ODE2OSAtMC40NzAyMzcgMS43NjEzOTUgLTAuMTQzNDYyIDEuNDQyNTkgLTAuMTQzNDYyQzEuMzQ2OTQ5IC0wLjE0MzQ2MiAxLjI1MTMwOCAtMC4xODMzMTMgMS4yNTEzMDggLTAuMzk4NTA2QzEuMjUxMzA4IC0wLjU4OTc4OCAxLjMwNzA5OCAtMC43MzMyNSAxLjQxMDcxIC0wLjk4MDMyNEMxLjQ5MDQxMSAtMS4xOTU1MTcgMS41NzAxMTIgLTEuNDEwNzEgMS42NTc3ODMgLTEuNjI1OTAzTDEuOTA0ODU3IC0yLjI3MTQ4MkMxLjk3NjU4OCAtMi40NTQ3OTUgMi4wNzIyMjkgLTIuNzAxODY4IDIuMDcyMjI5IC0yLjgzNzM2QzIuMDcyMjI5IC0zLjIzNTg2NiAxLjc1MzQyNSAtMy41MTQ4MTkgMS4zNDY5NDkgLTMuNTE0ODE5QzAuNTczODQ4IC0zLjUxNDgxOSAwLjIzOTEwMyAtMi4zOTkwMDQgMC4yMzkxMDMgLTIuMjk1MzkyQzAuMjM5MTAzIC0yLjIyMzY2MSAwLjI5NDg5NCAtMi4xOTE3ODEgMC4zNTg2NTUgLTIuMTkxNzgxQzAuNDYyMjY3IC0yLjE5MTc4MSAwLjQ3MDIzNyAtMi4yMzk2MDEgMC40OTQxNDcgLTIuMzE5MzAzQzAuNzE3MzEgLTMuMDc2NDYzIDEuMDgzOTM1IC0zLjI5MTY1NiAxLjMyMzAzOSAtMy4yOTE2NTZDMS40MzQ2MiAtMy4yOTE2NTYgMS41MTQzMjEgLTMuMjUxODA2IDEuNTE0MzIxIC0zLjAyODY0M0MxLjUxNDMyMSAtMi45NDg5NDEgMS41MDYzNTEgLTIuODM3MzYgMS40MjY2NSAtMi41OTgyNTdMMS4yMTE0NTcgLTIuMDQ4MzE5WicgaWQ9J2cxLTEwNScvPgo8cGF0aCBkPSdNNC43NzAxMTIgLTIuNzYxNjQ0SDguMDY5NzM4QzguMjM3MTExIC0yLjc2MTY0NCA4LjQ1MjMwNCAtMi43NjE2NDQgOC40NTIzMDQgLTIuOTc2ODM3QzguNDUyMzA0IC0zLjIwMzk4NSA4LjI0OTA2NiAtMy4yMDM5ODUgOC4wNjk3MzggLTMuMjAzOTg1SDQuNzcwMTEyVi02LjUwMzYxMUM0Ljc3MDExMiAtNi42NzA5ODQgNC43NzAxMTIgLTYuODg2MTc3IDQuNTU0OTE5IC02Ljg4NjE3N0M0LjMyNzc3MSAtNi44ODYxNzcgNC4zMjc3NzEgLTYuNjgyOTM5IDQuMzI3NzcxIC02LjUwMzYxMVYtMy4yMDM5ODVIMS4wMjgxNDRDMC44NjA3NzIgLTMuMjAzOTg1IDAuNjQ1NTc5IC0zLjIwMzk4NSAwLjY0NTU3OSAtMi45ODg3OTJDMC42NDU1NzkgLTIuNzYxNjQ0IDAuODQ4ODE3IC0yLjc2MTY0NCAxLjAyODE0NCAtMi43NjE2NDRINC4zMjc3NzFWMC41Mzc5ODNDNC4zMjc3NzEgMC43MDUzNTUgNC4zMjc3NzEgMC45MjA1NDggNC41NDI5NjQgMC45MjA1NDhDNC43NzAxMTIgMC45MjA1NDggNC43NzAxMTIgMC43MTczMSA0Ljc3MDExMiAwLjUzNzk4M1YtMi43NjE2NDRaJyBpZD0nZzQtNDMnLz4KPHBhdGggZD0nTTMuNDQzMDg4IC03LjY2MzI2M0MzLjQ0MzA4OCAtNy45MzgyMzIgMy40NDMwODggLTcuOTUwMTg3IDMuMjAzOTg1IC03Ljk1MDE4N0MyLjkxNzA2MSAtNy42MjczOTcgMi4zMTkzMDMgLTcuMTg1MDU2IDEuMDg3OTIgLTcuMTg1MDU2Vi02LjgzODM1NkMxLjM2Mjg4OSAtNi44MzgzNTYgMS45NjA2NDggLTYuODM4MzU2IDIuNjE4MTgyIC03LjE0OTE5MVYtMC45MjA1NDhDMi42MTgxODIgLTAuNDkwMTYyIDIuNTgyMzE2IC0wLjM0NjcgMS41MzAyNjIgLTAuMzQ2N0gxLjE1OTY1MVYwQzEuNDgyNDQxIC0wLjAyMzkxIDIuNjQyMDkyIC0wLjAyMzkxIDMuMDM2NjEzIC0wLjAyMzkxUzQuNTc4ODI5IC0wLjAyMzkxIDQuOTAxNjE5IDBWLTAuMzQ2N0g0LjUzMTAwOUMzLjQ3ODk1NCAtMC4zNDY3IDMuNDQzMDg4IC0wLjQ5MDE2MiAzLjQ0MzA4OCAtMC45MjA1NDhWLTcuNjYzMjYzWicgaWQ9J2c0LTQ5Jy8+CjxwYXRoIGQ9J001LjI2MDI3NCAtMi4wMDg0NjhINC45OTcyNkM0Ljk2MTM5NSAtMS44MDUyMyA0Ljg2NTc1MyAtMS4xNDc2OTYgNC43NDYyMDIgLTAuOTU2NDEzQzQuNjYyNTE2IC0wLjg0ODgxNyAzLjk4MTA3MSAtMC44NDg4MTcgMy42MjI0MTYgLTAuODQ4ODE3SDEuNDEwNzFDMS43MzM0OTkgLTEuMTIzNzg2IDIuNDYyNzY1IC0xLjg4ODkxNyAyLjc3MzU5OSAtMi4xNzU4NDFDNC41OTA3ODUgLTMuODQ5NTY0IDUuMjYwMjc0IC00LjQ3MTIzMyA1LjI2MDI3NCAtNS42NTQ3OTVDNS4yNjAyNzQgLTcuMDI5NjM5IDQuMTcyMzU0IC03Ljk1MDE4NyAyLjc4NTU1NCAtNy45NTAxODdTMC41ODU4MDMgLTYuNzY2NjI1IDAuNTg1ODAzIC01LjczODQ4MUMwLjU4NTgwMyAtNS4xMjg3NjcgMS4xMTE4MzEgLTUuMTI4NzY3IDEuMTQ3Njk2IC01LjEyODc2N0MxLjM5ODc1NSAtNS4xMjg3NjcgMS43MDk1ODkgLTUuMzA4MDk1IDEuNzA5NTg5IC01LjY5MDY2QzEuNzA5NTg5IC02LjAyNTQwNSAxLjQ4MjQ0MSAtNi4yNTI1NTMgMS4xNDc2OTYgLTYuMjUyNTUzQzEuMDQwMSAtNi4yNTI1NTMgMS4wMTYxODkgLTYuMjUyNTUzIDAuOTgwMzI0IC02LjI0MDU5OEMxLjIwNzQ3MiAtNy4wNTM1NDkgMS44NTMwNTEgLTcuNjAzNDg3IDIuNjMwMTM3IC03LjYwMzQ4N0MzLjY0NjMyNiAtNy42MDM0ODcgNC4yNjc5OTUgLTYuNzU0NjcgNC4yNjc5OTUgLTUuNjU0Nzk1QzQuMjY3OTk1IC00LjYzODYwNSAzLjY4MjE5MiAtMy43NTM5MjMgMy4wMDA3NDcgLTIuOTg4NzkyTDAuNTg1ODAzIC0wLjI4NjkyNFYwSDQuOTQ5NDRMNS4yNjAyNzQgLTIuMDA4NDY4WicgaWQ9J2c0LTUwJy8+CjxwYXRoIGQ9J004LjA2OTczOCAtMy44NzM0NzRDOC4yMzcxMTEgLTMuODczNDc0IDguNDUyMzA0IC0zLjg3MzQ3NCA4LjQ1MjMwNCAtNC4wODg2NjdDOC40NTIzMDQgLTQuMzE1ODE2IDguMjQ5MDY2IC00LjMxNTgxNiA4LjA2OTczOCAtNC4zMTU4MTZIMS4wMjgxNDRDMC44NjA3NzIgLTQuMzE1ODE2IDAuNjQ1NTc5IC00LjMxNTgxNiAwLjY0NTU3OSAtNC4xMDA2MjNDMC42NDU1NzkgLTMuODczNDc0IDAuODQ4ODE3IC0zLjg3MzQ3NCAxLjAyODE0NCAtMy44NzM0NzRIOC4wNjk3MzhaTTguMDY5NzM4IC0xLjY0OTgxM0M4LjIzNzExMSAtMS42NDk4MTMgOC40NTIzMDQgLTEuNjQ5ODEzIDguNDUyMzA0IC0xLjg2NTAwNkM4LjQ1MjMwNCAtMi4wOTIxNTQgOC4yNDkwNjYgLTIuMDkyMTU0IDguMDY5NzM4IC0yLjA5MjE1NEgxLjAyODE0NEMwLjg2MDc3MiAtMi4wOTIxNTQgMC42NDU1NzkgLTIuMDkyMTU0IDAuNjQ1NTc5IC0xLjg3Njk2MUMwLjY0NTU3OSAtMS42NDk4MTMgMC44NDg4MTcgLTEuNjQ5ODEzIDEuMDI4MTQ0IC0xLjY0OTgxM0g4LjA2OTczOFonIGlkPSdnNC02MScvPgo8cGF0aCBkPSdNMi45ODg3OTIgMi45ODg3OTJWMi41NDY0NTFIMS44MjkxNDFWLTguNTI0MDM1SDIuOTg4NzkyVi04Ljk2NjM3NkgxLjM4NjhWMi45ODg3OTJIMi45ODg3OTJaJyBpZD0nZzQtOTEnLz4KPHBhdGggZD0nTTEuODUzMDUxIC04Ljk2NjM3NkgwLjI1MTA1OVYtOC41MjQwMzVIMS40MTA3MVYyLjU0NjQ1MUgwLjI1MTA1OVYyLjk4ODc5MkgxLjg1MzA1MVYtOC45NjYzNzZaJyBpZD0nZzQtOTMnLz4KPHBhdGggZD0nTTcuODc4NDU2IC0yLjc0OTY4OUM4LjA4MTY5NCAtMi43NDk2ODkgOC4yOTY4ODcgLTIuNzQ5Njg5IDguMjk2ODg3IC0yLjk4ODc5MlM4LjA4MTY5NCAtMy4yMjc4OTUgNy44Nzg0NTYgLTMuMjI3ODk1SDEuNDEwNzFDMS4yMDc0NzIgLTMuMjI3ODk1IDAuOTkyMjc5IC0zLjIyNzg5NSAwLjk5MjI3OSAtMi45ODg3OTJTMS4yMDc0NzIgLTIuNzQ5Njg5IDEuNDEwNzEgLTIuNzQ5Njg5SDcuODc4NDU2WicgaWQ9J2cwLTAnLz4KPHBhdGggZD0nTTYuNTUxNDMyIC0yLjc0OTY4OUM2Ljc1NDY3IC0yLjc0OTY4OSA2Ljk2OTg2MyAtMi43NDk2ODkgNi45Njk4NjMgLTIuOTg4NzkyUzYuNzU0NjcgLTMuMjI3ODk1IDYuNTUxNDMyIC0zLjIyNzg5NUgxLjQ4MjQ0MUMxLjYyNTkwMyAtNC44Mjk4ODggMy4wMDA3NDcgLTUuOTc3NTg0IDQuNjg2NDI2IC01Ljk3NzU4NEg2LjU1MTQzMkM2Ljc1NDY3IC01Ljk3NzU4NCA2Ljk2OTg2MyAtNS45Nzc1ODQgNi45Njk4NjMgLTYuMjE2Njg3UzYuNzU0NjcgLTYuNDU1NzkxIDYuNTUxNDMyIC02LjQ1NTc5MUg0LjY2MjUxNkMyLjYxODE4MiAtNi40NTU3OTEgMC45OTIyNzkgLTQuOTAxNjE5IDAuOTkyMjc5IC0yLjk4ODc5MlMyLjYxODE4MiAwLjQ3ODIwNyA0LjY2MjUxNiAwLjQ3ODIwN0g2LjU1MTQzMkM2Ljc1NDY3IDAuNDc4MjA3IDYuOTY5ODYzIDAuNDc4MjA3IDYuOTY5ODYzIDAuMjM5MTAzUzYuNzU0NjcgMCA2LjU1MTQzMiAwSDQuNjg2NDI2QzMuMDAwNzQ3IDAgMS42MjU5MDMgLTEuMTQ3Njk2IDEuNDgyNDQxIC0yLjc0OTY4OUg2LjU1MTQzMlonIGlkPSdnMC01MCcvPgo8cGF0aCBkPSdNNi41ODcyOTggLTcuODQyNTlDNi42NDcwNzMgLTcuOTc0MDk3IDYuNjQ3MDczIC03Ljk5ODAwNyA2LjY0NzA3MyAtOC4wNTc3ODNDNi42NDcwNzMgLTguMTc3MzM1IDYuNTUxNDMyIC04LjI5Njg4NyA2LjQwNzk3IC04LjI5Njg4N0M2LjI1MjU1MyAtOC4yOTY4ODcgNi4xODA4MjIgLTguMTUzNDI1IDYuMTMzMDAxIC04LjAyMTkxOEw1LjE0MDcyMiAtNS4zOTE3ODFIMS41MDYzNTFMMC41MTQwNzIgLTguMDIxOTE4QzAuNDU0Mjk2IC04LjE4OTI5IDAuMzk0NTIxIC04LjI5Njg4NyAwLjIzOTEwMyAtOC4yOTY4ODdDMC4xMTk1NTIgLTguMjk2ODg3IDAgLTguMTc3MzM1IDAgLTguMDU3NzgzQzAgLTguMDMzODczIDAgLTguMDA5OTYzIDAuMDcxNzMxIC03Ljg0MjU5TDMuMDQ4NTY4IC0wLjAxMTk1NUMzLjEwODM0NCAwLjE1NTQxNyAzLjE2ODEyIDAuMjYzMDE0IDMuMzIzNTM3IDAuMjYzMDE0QzMuNDkwOTA5IDAuMjYzMDE0IDMuNTM4NzMgMC4xMzE1MDcgMy41ODY1NSAwLjAxMTk1NUw2LjU4NzI5OCAtNy44NDI1OVpNMS42OTc2MzQgLTQuOTEzNTc0SDQuOTQ5NDRMMy4zMjM1MzcgLTAuNjU3NTM0TDEuNjk3NjM0IC00LjkxMzU3NFonIGlkPSdnMC01NicvPgo8cGF0aCBkPSdNMi4xOTk3NTEgLTAuNTczODQ4QzIuMTk5NzUxIC0wLjkyMDU0OCAxLjkxMjgyNyAtMS4xNTk2NTEgMS42MjU5MDMgLTEuMTU5NjUxQzEuMjc5MjAzIC0xLjE1OTY1MSAxLjA0MDEgLTAuODcyNzI3IDEuMDQwMSAtMC41ODU4MDNDMS4wNDAxIC0wLjIzOTEwMyAxLjMyNzAyNCAwIDEuNjEzOTQ4IDBDMS45NjA2NDggMCAyLjE5OTc1MSAtMC4yODY5MjQgMi4xOTk3NTEgLTAuNTczODQ4WicgaWQ9J2cyLTU4Jy8+CjxwYXRoIGQ9J00yLjMzMTI1OCAwLjA0NzgyMUMyLjMzMTI1OCAtMC42NDU1NzkgMi4xMDQxMSAtMS4xNTk2NTEgMS42MTM5NDggLTEuMTU5NjUxQzEuMjMxMzgyIC0xLjE1OTY1MSAxLjA0MDEgLTAuODQ4ODE3IDEuMDQwMSAtMC41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNyAtMC4wNDc4MjEgMi4wMjA0MjMgLTAuMTU1NDE3QzIuMDQ0MzM0IC0wLjE3OTMyOCAyLjA1NjI4OSAtMC4xNzkzMjggMi4wNjgyNDQgLTAuMTc5MzI4QzIuMDkyMTU0IC0wLjE3OTMyOCAyLjA5MjE1NCAtMC4wMTE5NTUgMi4wOTIxNTQgMC4wNDc4MjFDMi4wOTIxNTQgMC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAwLjA0NzgyMVonIGlkPSdnMi01OScvPgo8cGF0aCBkPSdNMy4zODMzMTMgLTEuNzA5NTg5QzMuMzgzMzEzIC0xLjc2OTM2NSAzLjMzNTQ5MiAtMS44MTcxODYgMy4yNjM3NjEgLTEuODE3MTg2QzMuMTU2MTY0IC0xLjgxNzE4NiAzLjE0NDIwOSAtMS43ODEzMiAzLjA4NDQzMyAtMS41NzgwODJDMi43NzM1OTkgLTAuNDkwMTYyIDIuMjgzNDM3IC0wLjExOTU1MiAxLjg4ODkxNyAtMC4xMTk1NTJDMS43NDU0NTUgLTAuMTE5NTUyIDEuNTc4MDgyIC0wLjE1NTQxNyAxLjU3ODA4MiAtMC41MTQwNzJDMS41NzgwODIgLTAuODM2ODYyIDEuNzIxNTQ0IC0xLjE5NTUxNyAxLjg1MzA1MSAtMS41NTQxNzJMMi42ODk5MTMgLTMuNzc3ODMzQzIuNzI1Nzc4IC0zLjg3MzQ3NCAyLjgwOTQ2NSAtNC4wODg2NjcgMi44MDk0NjUgLTQuMzE1ODE2QzIuODA5NDY1IC00LjgxNzkzMyAyLjQ1MDgwOSAtNS4yNzIyMjkgMS44NjUwMDYgLTUuMjcyMjI5QzAuNzY1MTMxIC01LjI3MjIyOSAwLjMyMjc5IC0zLjUzODczIDAuMzIyNzkgLTMuNDQzMDg4QzAuMzIyNzkgLTMuMzk1MjY4IDAuMzcwNjEgLTMuMzM1NDkyIDAuNDU0Mjk2IC0zLjMzNTQ5MkMwLjU2MTg5MyAtMy4zMzU0OTIgMC41NzM4NDggLTMuMzgzMzEzIDAuNjIxNjY5IC0zLjU1MDY4NUMwLjkwODU5MyAtNC41NTQ5MTkgMS4zNjI4ODkgLTUuMDMzMTI2IDEuODI5MTQxIC01LjAzMzEyNkMxLjkzNjczNyAtNS4wMzMxMjYgMi4xMzk5NzUgLTUuMDIxMTcxIDIuMTM5OTc1IC00LjYzODYwNUMyLjEzOTk3NSAtNC4zMjc3NzEgMS45ODQ1NTggLTMuOTMzMjUgMS44ODg5MTcgLTMuNjcwMjM3TDEuMDUyMDU1IC0xLjQ0NjU3NUMwLjk4MDMyNCAtMS4yNTUyOTMgMC45MDg1OTMgLTEuMDY0MDEgMC45MDg1OTMgLTAuODQ4ODE3QzAuOTA4NTkzIC0wLjMxMDgzNCAxLjI3OTIwMyAwLjExOTU1MiAxLjg1MzA1MSAwLjExOTU1MkMyLjk1MjkyNyAwLjExOTU1MiAzLjM4MzMxMyAtMS42MjU5MDMgMy4zODMzMTMgLTEuNzA5NTg5Wk0zLjI4NzY3MSAtNy40NjAwMjVDMy4yODc2NzEgLTcuNjM5MzUyIDMuMTQ0MjA5IC03Ljg1NDU0NSAyLjg4MTE5NiAtNy44NTQ1NDVDMi42MDYyMjcgLTcuODU0NTQ1IDIuMjk1MzkyIC03LjU5MTUzMiAyLjI5NTM5MiAtNy4yODA2OTdDMi4yOTUzOTIgLTYuOTgxODE4IDIuNTQ2NDUxIC02Ljg4NjE3NyAyLjY4OTkxMyAtNi44ODYxNzdDMy4wMTI3MDIgLTYuODg2MTc3IDMuMjg3NjcxIC03LjE5NzAxMSAzLjI4NzY3MSAtNy40NjAwMjVaJyBpZD0nZzItMTA1Jy8+CjxwYXRoIGQ9J00yLjQ2Mjc2NSAtMy41MDI4NjRDMi40ODY2NzUgLTMuNTc0NTk1IDIuNzg1NTU0IC00LjE3MjM1NCAzLjIyNzg5NSAtNC41NTQ5MTlDMy41Mzg3MyAtNC44NDE4NDMgMy45NDUyMDUgLTUuMDMzMTI2IDQuNDExNDU3IC01LjAzMzEyNkM0Ljg4OTY2NCAtNS4wMzMxMjYgNS4wNTcwMzYgLTQuNjc0NDcxIDUuMDU3MDM2IC00LjE5NjI2NEM1LjA1NzAzNiAtMy41MTQ4MTkgNC41NjY4NzQgLTIuMTUxOTMgNC4zMjc3NzEgLTEuNTA2MzUxQzQuMjIwMTc0IC0xLjIxOTQyNyA0LjE2MDM5OSAtMS4wNjQwMSA0LjE2MDM5OSAtMC44NDg4MTdDNC4xNjAzOTkgLTAuMzEwODM0IDQuNTMxMDA5IDAuMTE5NTUyIDUuMTA0ODU3IDAuMTE5NTUyQzYuMjE2Njg3IDAuMTE5NTUyIDYuNjM1MTE4IC0xLjYzNzg1OCA2LjYzNTExOCAtMS43MDk1ODlDNi42MzUxMTggLTEuNzY5MzY1IDYuNTg3Mjk4IC0xLjgxNzE4NiA2LjUxNTU2NyAtMS44MTcxODZDNi40MDc5NyAtMS44MTcxODYgNi4zOTYwMTUgLTEuNzgxMzIgNi4zMzYyMzkgLTEuNTc4MDgyQzYuMDYxMjcgLTAuNTk3NzU4IDUuNjA2OTc0IC0wLjExOTU1MiA1LjE0MDcyMiAtMC4xMTk1NTJDNS4wMjExNzEgLTAuMTE5NTUyIDQuODI5ODg4IC0wLjEzMTUwNyA0LjgyOTg4OCAtMC41MTQwNzJDNC44Mjk4ODggLTAuODEyOTUxIDQuOTYxMzk1IC0xLjE3MTYwNiA1LjAzMzEyNiAtMS4zMzg5NzlDNS4yNzIyMjkgLTEuOTk2NTEzIDUuNzc0MzQ2IC0zLjMzNTQ5MiA1Ljc3NDM0NiAtNC4wMTY5MzZDNS43NzQzNDYgLTQuNzM0MjQ3IDUuMzU1OTE1IC01LjI3MjIyOSA0LjQ0NzMyMyAtNS4yNzIyMjlDMy4zODMzMTMgLTUuMjcyMjI5IDIuODIxNDIgLTQuNTE5MDU0IDIuNjA2MjI3IC00LjIyMDE3NEMyLjU3MDM2MSAtNC45MDE2MTkgMi4wODAxOTkgLTUuMjcyMjI5IDEuNTU0MTcyIC01LjI3MjIyOUMxLjE3MTYwNiAtNS4yNzIyMjkgMC45MDg1OTMgLTUuMDQ1MDgxIDAuNzA1MzU1IC00LjYzODYwNUMwLjQ5MDE2MiAtNC4yMDgyMTkgMC4zMjI3OSAtMy40OTA5MDkgMC4zMjI3OSAtMy40NDMwODhTMC4zNzA2MSAtMy4zMzU0OTIgMC40NTQyOTYgLTMuMzM1NDkyQzAuNTQ5OTM4IC0zLjMzNTQ5MiAwLjU2MTg5MyAtMy4zNDc0NDcgMC42MzM2MjQgLTMuNjIyNDE2QzAuODI0OTA3IC00LjM1MTY4MSAxLjA0MDEgLTUuMDMzMTI2IDEuNTE4MzA2IC01LjAzMzEyNkMxLjc5MzI3NSAtNS4wMzMxMjYgMS44ODg5MTcgLTQuODQxODQzIDEuODg4OTE3IC00LjQ4MzE4OEMxLjg4ODkxNyAtNC4yMjAxNzQgMS43NjkzNjUgLTMuNzUzOTIzIDEuNjg1Njc5IC0zLjM4MzMxM0wxLjM1MDkzNCAtMi4wOTIxNTRDMS4zMDMxMTMgLTEuODY1MDA2IDEuMTcxNjA2IC0xLjMyNzAyNCAxLjExMTgzMSAtMS4xMTE4MzFDMS4wMjgxNDQgLTAuODAwOTk2IDAuODk2NjM4IC0wLjIzOTEwMyAwLjg5NjYzOCAtMC4xNzkzMjhDMC44OTY2MzggLTAuMDExOTU1IDEuMDI4MTQ0IDAuMTE5NTUyIDEuMjA3NDcyIDAuMTE5NTUyQzEuMzUwOTM0IDAuMTE5NTUyIDEuNTE4MzA2IDAuMDQ3ODIxIDEuNjEzOTQ4IC0wLjEzMTUwN0MxLjYzNzg1OCAtMC4xOTEyODMgMS43NDU0NTUgLTAuNjA5NzE0IDEuODA1MjMgLTAuODQ4ODE3TDIuMDY4MjQ0IC0xLjkyNDc4MkwyLjQ2Mjc2NSAtMy41MDI4NjRaJyBpZD0nZzItMTEwJy8+CjxwYXRoIGQ9J00wLjUxNDA3MiAxLjUxODMwNkMwLjQzMDM4NiAxLjg3Njk2MSAwLjM4MjU2NSAxLjk3MjYwMyAtMC4xMDc1OTcgMS45NzI2MDNDLTAuMjUxMDU5IDEuOTcyNjAzIC0wLjM3MDYxIDEuOTcyNjAzIC0wLjM3MDYxIDIuMTk5NzUxQy0wLjM3MDYxIDIuMjIzNjYxIC0wLjM1ODY1NSAyLjMxOTMwMyAtMC4yMjcxNDggMi4zMTkzMDNDLTAuMDcxNzMxIDIuMzE5MzAzIDAuMDk1NjQxIDIuMjk1MzkyIDAuMjUxMDU5IDIuMjk1MzkySDAuNzY1MTMxQzEuMDE2MTg5IDIuMjk1MzkyIDEuNjI1OTAzIDIuMzE5MzAzIDEuODc2OTYxIDIuMzE5MzAzQzEuOTQ4NjkyIDIuMzE5MzAzIDIuMDkyMTU0IDIuMzE5MzAzIDIuMDkyMTU0IDIuMTA0MTFDMi4wOTIxNTQgMS45NzI2MDMgMi4wMDg0NjggMS45NzI2MDMgMS44MDUyMyAxLjk3MjYwM0MxLjI1NTI5MyAxLjk3MjYwMyAxLjIxOTQyNyAxLjg4ODkxNyAxLjIxOTQyNyAxLjc5MzI3NUMxLjIxOTQyNyAxLjY0OTgxMyAxLjc1NzQxIC0wLjQwNjQ3NiAxLjgyOTE0MSAtMC42ODE0NDVDMS45NjA2NDggLTAuMzQ2NyAyLjI4MzQzNyAwLjExOTU1MiAyLjkwNTEwNiAwLjExOTU1MkM0LjI1NjA0IDAuMTE5NTUyIDUuNzE0NTcgLTEuNjM3ODU4IDUuNzE0NTcgLTMuMzk1MjY4QzUuNzE0NTcgLTQuNDk1MTQzIDUuMDkyOTAyIC01LjI3MjIyOSA0LjE5NjI2NCAtNS4yNzIyMjlDMy40MzExMzMgLTUuMjcyMjI5IDIuNzg1NTU0IC00LjUzMTAwOSAyLjY1NDA0NyAtNC4zNjM2MzZDMi41NTg0MDYgLTQuOTYxMzk1IDIuMDkyMTU0IC01LjI3MjIyOSAxLjYxMzk0OCAtNS4yNzIyMjlDMS4yNjcyNDggLTUuMjcyMjI5IDAuOTkyMjc5IC01LjEwNDg1NyAwLjc2NTEzMSAtNC42NTA1NkMwLjU0OTkzOCAtNC4yMjAxNzQgMC4zODI1NjUgLTMuNDkwOTA5IDAuMzgyNTY1IC0zLjQ0MzA4OFMwLjQzMDM4NiAtMy4zMzU0OTIgMC41MTQwNzIgLTMuMzM1NDkyQzAuNjA5NzE0IC0zLjMzNTQ5MiAwLjYyMTY2OSAtMy4zNDc0NDcgMC42OTM0IC0zLjYyMjQxNkMwLjg3MjcyNyAtNC4zMjc3NzEgMS4wOTk4NzUgLTUuMDMzMTI2IDEuNTc4MDgyIC01LjAzMzEyNkMxLjg1MzA1MSAtNS4wMzMxMjYgMS45NDg2OTIgLTQuODQxODQzIDEuOTQ4NjkyIC00LjQ4MzE4OEMxLjk0ODY5MiAtNC4xOTYyNjQgMS45MTI4MjcgLTQuMDc2NzEyIDEuODY1MDA2IC0zLjg2MTUxOUwwLjUxNDA3MiAxLjUxODMwNlpNMi41ODIzMTYgLTMuNzMwMDEyQzIuNjY2MDAyIC00LjA2NDc1NyAzLjAwMDc0NyAtNC40MTE0NTcgMy4xOTIwMyAtNC41Nzg4MjlDMy4zMjM1MzcgLTQuNjk4MzgxIDMuNzE4MDU3IC01LjAzMzEyNiA0LjE3MjM1NCAtNS4wMzMxMjZDNC42OTgzODEgLTUuMDMzMTI2IDQuOTM3NDg0IC00LjUwNzA5OCA0LjkzNzQ4NCAtMy44ODU0M0M0LjkzNzQ4NCAtMy4zMTE1ODIgNC42MDI3NCAtMS45NjA2NDggNC4zMDM4NjEgLTEuMzM4OTc5QzQuMDA0OTgxIC0wLjY5MzQgMy40NTUwNDQgLTAuMTE5NTUyIDIuOTA1MTA2IC0wLjExOTU1MkMyLjA5MjE1NCAtMC4xMTk1NTIgMS45NjA2NDggLTEuMTQ3Njk2IDEuOTYwNjQ4IC0xLjE5NTUxN0MxLjk2MDY0OCAtMS4yMzEzODIgMS45ODQ1NTggLTEuMzI3MDI0IDEuOTk2NTEzIC0xLjM4NjhMMi41ODIzMTYgLTMuNzMwMDEyWicgaWQ9J2cyLTExMicvPgo8cGF0aCBkPSdNNS42NjY3NSAtNC44Nzc3MDlDNS4yODQxODQgLTQuODA1OTc4IDUuMTQwNzIyIC00LjUxOTA1NCA1LjE0MDcyMiAtNC4yOTE5MDVDNS4xNDA3MjIgLTQuMDA0OTgxIDUuMzY3ODcgLTMuOTA5MzQgNS41MzUyNDMgLTMuOTA5MzRDNS44OTM4OTggLTMuOTA5MzQgNi4xNDQ5NTYgLTQuMjIwMTc0IDYuMTQ0OTU2IC00LjU0Mjk2NEM2LjE0NDk1NiAtNS4wNDUwODEgNS41NzExMDggLTUuMjcyMjI5IDUuMDY4OTkxIC01LjI3MjIyOUM0LjMzOTcyNiAtNS4yNzIyMjkgMy45MzMyNSAtNC41NTQ5MTkgMy44MjU2NTQgLTQuMzI3NzcxQzMuNTUwNjg1IC01LjIyNDQwOCAyLjgwOTQ2NSAtNS4yNzIyMjkgMi41OTQyNzEgLTUuMjcyMjI5QzEuMzc0ODQ0IC01LjI3MjIyOSAwLjcyOTI2NSAtMy43MDYxMDIgMC43MjkyNjUgLTMuNDQzMDg4QzAuNzI5MjY1IC0zLjM5NTI2OCAwLjc3NzA4NiAtMy4zMzU0OTIgMC44NjA3NzIgLTMuMzM1NDkyQzAuOTU2NDEzIC0zLjMzNTQ5MiAwLjk4MDMyNCAtMy40MDcyMjMgMS4wMDQyMzQgLTMuNDU1MDQ0QzEuNDEwNzEgLTQuNzgyMDY3IDIuMjExNzA2IC01LjAzMzEyNiAyLjU1ODQwNiAtNS4wMzMxMjZDMy4wOTYzODkgLTUuMDMzMTI2IDMuMjAzOTg1IC00LjUzMTAwOSAzLjIwMzk4NSAtNC4yNDQwODVDMy4yMDM5ODUgLTMuOTgxMDcxIDMuMTMyMjU0IC0zLjcwNjEwMiAyLjk4ODc5MiAtMy4xMzIyNTRMMi41ODIzMTYgLTEuNDk0Mzk2QzIuNDAyOTg5IC0wLjc3NzA4NiAyLjA1NjI4OSAtMC4xMTk1NTIgMS40MjI2NjUgLTAuMTE5NTUyQzEuMzYyODg5IC0wLjExOTU1MiAxLjA2NDAxIC0wLjExOTU1MiAwLjgxMjk1MSAtMC4yNzQ5NjlDMS4yNDMzMzcgLTAuMzU4NjU1IDEuMzM4OTc5IC0wLjcxNzMxIDEuMzM4OTc5IC0wLjg2MDc3MkMxLjMzODk3OSAtMS4wOTk4NzUgMS4xNTk2NTEgLTEuMjQzMzM3IDAuOTMyNTAzIC0xLjI0MzMzN0MwLjY0NTU3OSAtMS4yNDMzMzcgMC4zMzQ3NDUgLTAuOTkyMjc5IDAuMzM0NzQ1IC0wLjYwOTcxNEMwLjMzNDc0NSAtMC4xMDc1OTcgMC44OTY2MzggMC4xMTk1NTIgMS40MTA3MSAwLjExOTU1MkMxLjk4NDU1OCAwLjExOTU1MiAyLjM5MTAzNCAtMC4zMzQ3NDUgMi42NDIwOTIgLTAuODI0OTA3QzIuODMzMzc1IC0wLjExOTU1MiAzLjQzMTEzMyAwLjExOTU1MiAzLjg3MzQ3NCAwLjExOTU1MkM1LjA5MjkwMiAwLjExOTU1MiA1LjczODQ4MSAtMS40NDY1NzUgNS43Mzg0ODEgLTEuNzA5NTg5QzUuNzM4NDgxIC0xLjc2OTM2NSA1LjY5MDY2IC0xLjgxNzE4NiA1LjYxODkyOSAtMS44MTcxODZDNS41MTEzMzMgLTEuODE3MTg2IDUuNDk5Mzc3IC0xLjc1NzQxIDUuNDYzNTEyIC0xLjY2MTc2OEM1LjE0MDcyMiAtMC42MDk3MTQgNC40NDczMjMgLTAuMTE5NTUyIDMuOTA5MzQgLTAuMTE5NTUyQzMuNDkwOTA5IC0wLjExOTU1MiAzLjI2Mzc2MSAtMC40MzAzODYgMy4yNjM3NjEgLTAuOTIwNTQ4QzMuMjYzNzYxIC0xLjE4MzU2MiAzLjMxMTU4MiAtMS4zNzQ4NDQgMy41MDI4NjQgLTIuMTYzODg1TDMuOTIxMjk1IC0zLjc4OTc4OEM0LjEwMDYyMyAtNC41MDcwOTggNC41MDcwOTggLTUuMDMzMTI2IDUuMDU3MDM2IC01LjAzMzEyNkM1LjA4MDk0NiAtNS4wMzMxMjYgNS40MTU2OTEgLTUuMDMzMTI2IDUuNjY2NzUgLTQuODc3NzA5WicgaWQ9J2cyLTEyMCcvPgo8L2RlZnM+CjxnIGlkPSdwYWdlMSc+Cjx1c2UgeD0nMTQ2LjQ1MjI4NCcgeGxpbms6aHJlZj0nI2cwLTU2JyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScxNTMuMDk0MDY0JyB4bGluazpocmVmPScjZzItMTA1JyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScxNjAuNDA4MzI2JyB4bGluazpocmVmPScjZzAtNTAnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzE3MS42OTkyOTQnIHhsaW5rOmhyZWY9JyNnNC05MScgeT0nOTQuNjMwMzA1Jy8+Cjx1c2UgeD0nMTc0Ljk1MDk1NScgeGxpbms6aHJlZj0nI2c0LTkxJyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScxNzguMjAyNjE3JyB4bGluazpocmVmPScjZzQtNDknIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzE4NC4wNTU2MDcnIHhsaW5rOmhyZWY9JyNnMi01OCcgeT0nOTQuNjMwMzA1Jy8+Cjx1c2UgeD0nMTg3LjMwNzI2OCcgeGxpbms6aHJlZj0nI2cyLTU4JyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScxOTAuNTU4OTI5JyB4bGluazpocmVmPScjZzItMTEwJyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScxOTcuNTQ2NTM1JyB4bGluazpocmVmPScjZzQtOTMnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzIwMC43OTgxOTYnIHhsaW5rOmhyZWY9JyNnNC05MycgeT0nOTQuNjMwMzA1Jy8+Cjx1c2UgeD0nMjA0LjA0OTg1NycgeGxpbms6aHJlZj0nI2cyLTU5JyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScyMTIuNjE0ODQ2JyB4bGluazpocmVmPScjZzItMTEyJyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScyMTguNDg5OTg5JyB4bGluazpocmVmPScjZzEtMTA1JyB5PSc5Ni40MjM1NjgnLz4KPHVzZSB4PScyMjUuMTkyMDknIHhsaW5rOmhyZWY9JyNnNC02MScgeT0nOTQuNjMwMzA1Jy8+Cjx1c2UgeD0nMjM3LjYxNzU3MScgeGxpbms6aHJlZj0nI2cwLTAnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzI0Ni45MTYwNjgnIHhsaW5rOmhyZWY9JyNnMi0xMjAnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzI1My41NjgxNTUnIHhsaW5rOmhyZWY9JyNnMy00OCcgeT0nOTYuNDIzNTY4Jy8+Cjx1c2UgeD0nMjYwLjk1NzEzMycgeGxpbms6aHJlZj0nI2c0LTQzJyB5PSc5NC42MzAzMDUnLz4KPHVzZSB4PScyNzIuNzE4NDQ4JyB4bGluazpocmVmPScjZzQtNTAnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzI3OC41NzE0MzgnIHhsaW5rOmhyZWY9JyNnMi0xMjAnIHk9Jzk0LjYzMDMwNScvPgo8dXNlIHg9JzI4NS4yMjM1MjUnIHhsaW5rOmhyZWY9JyNnMy00OCcgeT0nOTYuNDIzNTY4Jy8+Cjx1c2UgeD0nMjkyLjY0ODQ0MScgeGxpbms6aHJlZj0nI2cyLTEwNScgeT0nODYuNTQyNTQ2Jy8+Cjx1c2UgeD0nMjk5LjI5ODUzNycgeGxpbms6aHJlZj0nI2cwLTAnIHk9Jzg2LjU0MjU0NicvPgo8dXNlIHg9JzMxMS4yNTM2OTcnIHhsaW5rOmhyZWY9JyNnNC00OScgeT0nODYuNTQyNTQ2Jy8+CjxyZWN0IGhlaWdodD0nMC40NzgxODcnIHdpZHRoPScyNy40NTI0MTInIHg9JzI5MS4xNTEzNTQnIHk9JzkxLjQwMjQxOScvPgo8dXNlIHg9JzI5MS4xNTEzNTQnIHhsaW5rOmhyZWY9JyNnMi0xMTAnIHk9JzEwMi44MzA5NjcnLz4KPHVzZSB4PSczMDAuNzk1NjIzJyB4bGluazpocmVmPScjZzAtMCcgeT0nMTAyLjgzMDk2NycvPgo8dXNlIHg9JzMxMi43NTA3ODQnIHhsaW5rOmhyZWY9JyNnNC00OScgeT0nMTAyLjgzMDk2NycvPgo8L2c+Cjwvc3ZnPg==)
Pour chaque masse, on calcule une accélération  et
et
 (les extrémités sont fixes). On met à la jour
comme suit :
(les extrémités sont fixes). On met à la jour
comme suit :

Si
 alors
alors
![a_i \longleftarrow a_i + k \left[ \left\Vert\overset{\longrightarrow}{p_{i-1},p_i }\right\Vert - \frac{L}{n-1} \right] \frac{\overset{\longrightarrow}{p_{i-1},p_i }}{ \left\Vert\overset{\longrightarrow}{p_{i-1},p_i }\right\Vert }](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuNi4xIC0tPgo8c3ZnIGhlaWdodD0nMjQuNjYyMjAxcHQnIHZlcnNpb249JzEuMScgdmlld0JveD0nNTYuNDEzMjY3IDUzLjMwNjM3MiAyMDEuNzIyOTI4IDI0LjY2MjIwMScgd2lkdGg9JzIwMS43MjI5MjhwdCcgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluayc+CjxkZWZzPgo8cGF0aCBkPSdNMi4wODAxOTkgLTMuNzMwMDEyQzIuMDgwMTk5IC0zLjg3MzQ3NCAxLjk3MjYwMyAtMy45NjkxMTYgMS44MzUxMTggLTMuOTY5MTE2QzEuNjczNzI0IC0zLjk2OTExNiAxLjUwMDM3NCAtMy44MTM2OTkgMS41MDAzNzQgLTMuNjQwMzQ5QzEuNTAwMzc0IC0zLjQ5MDkwOSAxLjYwNzk3IC0zLjQwMTI0NSAxLjczOTQ3NyAtMy40MDEyNDVDMS45MzA3NiAtMy40MDEyNDUgMi4wODAxOTkgLTMuNTgwNTczIDIuMDgwMTk5IC0zLjczMDAxMlpNMS43MjE1NDQgLTEuNjQzODM2QzEuNzQ1NDU1IC0xLjcwMzYxMSAxLjc5OTI1MyAtMS44NDcwNzMgMS44MjMxNjMgLTEuOTAwODcyQzEuODQxMDk2IC0xLjk1NDY3IDEuODY1MDA2IC0yLjAxNDQ0NiAxLjg2NTAwNiAtMi4xMTYwNjVDMS44NjUwMDYgLTIuNDUwODA5IDEuNTY2MTI3IC0yLjYzNjExNSAxLjI2NzI0OCAtMi42MzYxMTVDMC42NTc1MzQgLTIuNjM2MTE1IDAuMzY0NjMzIC0xLjg0NzA3MyAwLjM2NDYzMyAtMS43MTU1NjdDMC4zNjQ2MzMgLTEuNjg1Njc5IDAuMzg4NTQzIC0xLjYzMTg4IDAuNDcyMjI5IC0xLjYzMTg4UzAuNTczODQ4IC0xLjY2Nzc0NiAwLjU5MTc4MSAtMS43MjE1NDRDMC43NTkxNTMgLTIuMzAxMzcgMS4wNzU5NjUgLTIuNDM4ODU0IDEuMjQzMzM3IC0yLjQzODg1NEMxLjM2Mjg4OSAtMi40Mzg4NTQgMS40MDQ3MzIgLTIuMzYxMTQ2IDEuNDA0NzMyIC0yLjIyMzY2MUMxLjQwNDczMiAtMi4xMDQxMSAxLjM2ODg2NyAtMi4wMTQ0NDYgMS4zNTY5MTIgLTEuOTcyNjAzTDEuMDQ2MDc3IC0xLjIwNzQ3MkMwLjk3NDM0NiAtMS4wMzQxMjIgMC45NzQzNDYgLTEuMDIyMTY3IDAuODk2NjM4IC0wLjgxODkyOUMwLjgxODkyOSAtMC42Mzk2MDEgMC43ODkwNDEgLTAuNTYxODkzIDAuNzg5MDQxIC0wLjQ2MDI3NEMwLjc4OTA0MSAtMC4xNTU0MTcgMS4wNjQwMSAwLjA1OTc3NiAxLjM5Mjc3NyAwLjA1OTc3NkMxLjk5NjUxMyAwLjA1OTc3NiAyLjI5NTM5MiAtMC43MjkyNjUgMi4yOTUzOTIgLTAuODYwNzcyQzIuMjk1MzkyIC0wLjg3MjcyNyAyLjI4OTQxNSAtMC45NDQ0NTggMi4xODE4MTggLTAuOTQ0NDU4QzIuMDk4MTMyIC0wLjk0NDQ1OCAyLjA5MjE1NCAtMC45MTQ1NyAyLjA1NjI4OSAtMC44MDA5OTZDMS45NjA2NDggLTAuNDk2MTM5IDEuNzE1NTY3IC0wLjEzNzQ4NCAxLjQxMDcxIC0wLjEzNzQ4NEMxLjMwMzExMyAtMC4xMzc0ODQgMS4yNDkzMTUgLTAuMjA5MjE1IDEuMjQ5MzE1IC0wLjM1MjY3N0MxLjI0OTMxNSAtMC40NzIyMjkgMS4yODUxODEgLTAuNTYxODkzIDEuMzYyODg5IC0wLjc0NzE5OEwxLjcyMTU0NCAtMS42NDM4MzZaJyBpZD0nZzQtMTA1Jy8+CjxwYXRoIGQ9J00yLjUwMjYxNSAtNS4wNzY5NjFDMi41MDI2MTUgLTUuMjkyMTU0IDIuNDg2Njc1IC01LjMwMDEyNSAyLjI3MTQ4MiAtNS4zMDAxMjVDMS45NDQ3MDcgLTQuOTgxMzIgMS41MjIyOTEgLTQuNzkwMDM3IDAuNzY1MTMxIC00Ljc5MDAzN1YtNC41MjcwMjRDMC45ODAzMjQgLTQuNTI3MDI0IDEuNDEwNzEgLTQuNTI3MDI0IDEuODcyOTc2IC00Ljc0MjIxN1YtMC42NTM1NDlDMS44NzI5NzYgLTAuMzU4NjU1IDEuODQ5MDY2IC0wLjI2MzAxNCAxLjA5MTkwNSAtMC4yNjMwMTRIMC44MTI5NTFWMEMxLjEzOTcyNiAtMC4wMjM5MSAxLjgyNTE1NiAtMC4wMjM5MSAyLjE4MzgxMSAtMC4wMjM5MVMzLjIzNTg2NiAtMC4wMjM5MSAzLjU2MjY0IDBWLTAuMjYzMDE0SDMuMjgzNjg2QzIuNTI2NTI2IC0wLjI2MzAxNCAyLjUwMjYxNSAtMC4zNTg2NTUgMi41MDI2MTUgLTAuNjUzNTQ5Vi01LjA3Njk2MVonIGlkPSdnOC00OScvPgo8cGF0aCBkPSdNMS40OTA0MTEgLTAuMTE5NTUyQzEuNDkwNDExIDAuMzk4NTA2IDEuMzc4ODI5IDAuODUyODAyIDAuODg0NjgyIDEuMzQ2OTQ5QzAuODUyODAyIDEuMzcwODU5IDAuODM2ODYyIDEuMzg2OCAwLjgzNjg2MiAxLjQyNjY1QzAuODM2ODYyIDEuNDkwNDExIDAuOTAwNjIzIDEuNTM4MjMyIDAuOTU2NDEzIDEuNTM4MjMyQzEuMDUyMDU1IDEuNTM4MjMyIDEuNzEzNTc0IDAuOTA4NTkzIDEuNzEzNTc0IC0wLjAyMzkxQzEuNzEzNTc0IC0wLjUzMzk5OCAxLjUyMjI5MSAtMC44ODQ2ODIgMS4xNzE2MDYgLTAuODg0NjgyQzAuODkyNjUzIC0wLjg4NDY4MiAwLjczMzI1IC0wLjY2MTUxOSAwLjczMzI1IC0wLjQ0NjMyNkMwLjczMzI1IC0wLjIyMzE2MyAwLjg4NDY4MiAwIDEuMTc5NTc3IDBDMS4zNzA4NTkgMCAxLjQ5MDQxMSAtMC4xMTE1ODIgMS40OTA0MTEgLTAuMTE5NTUyWicgaWQ9J2c1LTU5Jy8+CjxwYXRoIGQ9J00zLjA5MjQwMyAtNC44MjE5MThDMy4xNjQxMzQgLTUuMDkyOTAyIDMuMTgwMDc1IC01LjE4MDU3MyAzLjkxMzMyNSAtNS4xODA1NzNDNC4xMzY0ODggLTUuMTgwNTczIDQuMjE2MTg5IC01LjE4MDU3MyA0LjIxNjE4OSAtNS4zMzIwMDVDNC4yMTYxODkgLTUuMzQ3OTQ1IDQuMjAwMjQ5IC01LjQ0MzU4NyA0LjA4MDY5NyAtNS40NDM1ODdDMy45MTMzMjUgLTUuNDQzNTg3IDMuNjc0MjIyIC01LjQyNzY0NiAzLjUwNjg0OSAtNS40MTk2NzZIMi45MzMwMDFDMi4xMDQxMSAtNS40MTk2NzYgMS45MTI4MjcgLTUuNDQzNTg3IDEuODU3MDM2IC01LjQ0MzU4N0MxLjgyNTE1NiAtNS40NDM1ODcgMS42OTc2MzQgLTUuNDQzNTg3IDEuNjk3NjM0IC01LjI5MjE1NEMxLjY5NzYzNCAtNS4xODA1NzMgMS44MDEyNDUgLTUuMTgwNTczIDEuOTI4NzY3IC01LjE4MDU3M0MyLjE5MTc4MSAtNS4xODA1NzMgMi40MjI5MTQgLTUuMTgwNTczIDIuNDIyOTE0IC01LjA1MzA1MUMyLjQyMjkxNCAtNS4wMjExNzEgMi40MTQ5NDQgLTUuMDEzMiAyLjM5MTAzNCAtNC45MDk1ODlMMS4zMjMwMzkgLTAuNjI5NjM5QzEuMjUxMzA4IC0wLjMyNjc3NSAxLjIzNTM2NyAtMC4yNjMwMTQgMC42NDU1NzkgLTAuMjYzMDE0QzAuNDk0MTQ3IC0wLjI2MzAxNCAwLjM5ODUwNiAtMC4yNjMwMTQgMC4zOTg1MDYgLTAuMTExNTgyQzAuMzk4NTA2IDAgMC41MDIxMTcgMCAwLjYzNzYwOSAwSDQuNDg3MTczQzQuNjg2NDI2IDAgNC42OTQzOTYgLTAuMDA3OTcgNC43NTgxNTcgLTAuMTU5NDAyQzQuODM3ODU4IC0wLjM4MjU2NSA1LjQxOTY3NiAtMS44ODA5NDYgNS40MTk2NzYgLTEuOTYwNjQ4QzUuNDE5Njc2IC0yLjAzMjM3OSA1LjM1NTkxNSAtMi4wNzIyMjkgNS4zMDAxMjUgLTIuMDcyMjI5QzUuMjEyNDUzIC0yLjA3MjIyOSA1LjE5NjUxMyAtMi4wMTY0MzggNS4xNDA3MjIgLTEuODk2ODg3QzQuODUzNzk4IC0xLjE1NTY2NiA0LjUxMTA4MyAtMC4yNjMwMTQgMy4wODQ0MzMgLTAuMjYzMDE0SDIuMDcyMjI5QzIuMDAwNDk4IC0wLjI3ODk1NCAxLjk3NjU4OCAtMC4yNzg5NTQgMS45NzY1ODggLTAuMzM0NzQ1QzEuOTc2NTg4IC0wLjM5ODUwNiAxLjk5MjUyOCAtMC40NjIyNjcgMi4wMDg0NjggLTAuNTEwMDg3TDMuMDkyNDAzIC00LjgyMTkxOFonIGlkPSdnNS03NicvPgo8cGF0aCBkPSdNMi4zNzUwOTMgLTQuOTczMzVDMi4zNzUwOTMgLTUuMTQ4NjkyIDIuMjQ3NTcyIC01LjI3NjIxNCAyLjA2NDI1OSAtNS4yNzYyMTRDMS44NTcwMzYgLTUuMjc2MjE0IDEuNjI1OTAzIC01LjA4NDkzMiAxLjYyNTkwMyAtNC44NDU4MjhDMS42MjU5MDMgLTQuNjcwNDg2IDEuNzUzNDI1IC00LjU0Mjk2NCAxLjkzNjczNyAtNC41NDI5NjRDMi4xNDM5NiAtNC41NDI5NjQgMi4zNzUwOTMgLTQuNzM0MjQ3IDIuMzc1MDkzIC00Ljk3MzM1Wk0xLjIxMTQ1NyAtMi4wNDgzMTlMMC43ODEwNzEgLTAuOTQ4NDQzQzAuNzQxMjIgLTAuODI4ODkyIDAuNzAxMzcgLTAuNzMzMjUgMC43MDEzNyAtMC41OTc3NThDMC43MDEzNyAtMC4yMDcyMjMgMS4wMDQyMzQgMC4wNzk3MDEgMS40MjY2NSAwLjA3OTcwMUMyLjE5OTc1MSAwLjA3OTcwMSAyLjUyNjUyNiAtMS4wMzYxMTUgMi41MjY1MjYgLTEuMTM5NzI2QzIuNTI2NTI2IC0xLjIxOTQyNyAyLjQ2Mjc2NSAtMS4yNDMzMzcgMi40MDY5NzQgLTEuMjQzMzM3QzIuMzExMzMzIC0xLjI0MzMzNyAyLjI5NTM5MiAtMS4xODc1NDcgMi4yNzE0ODIgLTEuMTA3ODQ2QzIuMDg4MTY5IC0wLjQ3MDIzNyAxLjc2MTM5NSAtMC4xNDM0NjIgMS40NDI1OSAtMC4xNDM0NjJDMS4zNDY5NDkgLTAuMTQzNDYyIDEuMjUxMzA4IC0wLjE4MzMxMyAxLjI1MTMwOCAtMC4zOTg1MDZDMS4yNTEzMDggLTAuNTg5Nzg4IDEuMzA3MDk4IC0wLjczMzI1IDEuNDEwNzEgLTAuOTgwMzI0QzEuNDkwNDExIC0xLjE5NTUxNyAxLjU3MDExMiAtMS40MTA3MSAxLjY1Nzc4MyAtMS42MjU5MDNMMS45MDQ4NTcgLTIuMjcxNDgyQzEuOTc2NTg4IC0yLjQ1NDc5NSAyLjA3MjIyOSAtMi43MDE4NjggMi4wNzIyMjkgLTIuODM3MzZDMi4wNzIyMjkgLTMuMjM1ODY2IDEuNzUzNDI1IC0zLjUxNDgxOSAxLjM0Njk0OSAtMy41MTQ4MTlDMC41NzM4NDggLTMuNTE0ODE5IDAuMjM5MTAzIC0yLjM5OTAwNCAwLjIzOTEwMyAtMi4yOTUzOTJDMC4yMzkxMDMgLTIuMjIzNjYxIDAuMjk0ODk0IC0yLjE5MTc4MSAwLjM1ODY1NSAtMi4xOTE3ODFDMC40NjIyNjcgLTIuMTkxNzgxIDAuNDcwMjM3IC0yLjIzOTYwMSAwLjQ5NDE0NyAtMi4zMTkzMDNDMC43MTczMSAtMy4wNzY0NjMgMS4wODM5MzUgLTMuMjkxNjU2IDEuMzIzMDM5IC0zLjI5MTY1NkMxLjQzNDYyIC0zLjI5MTY1NiAxLjUxNDMyMSAtMy4yNTE4MDYgMS41MTQzMjEgLTMuMDI4NjQzQzEuNTE0MzIxIC0yLjk0ODk0MSAxLjUwNjM1MSAtMi44MzczNiAxLjQyNjY1IC0yLjU5ODI1N0wxLjIxMTQ1NyAtMi4wNDgzMTlaJyBpZD0nZzUtMTA1Jy8+CjxwYXRoIGQ9J00xLjU5NDAyMiAtMS4zMDcwOThDMS42MTc5MzMgLTEuNDI2NjUgMS42OTc2MzQgLTEuNzI5NTE0IDEuNzIxNTQ0IC0xLjg0OTA2NkMxLjgzMzEyNiAtMi4yNzk0NTIgMS44MzMxMjYgLTIuMjg3NDIyIDIuMDE2NDM4IC0yLjU1MDQzNkMyLjI3OTQ1MiAtMi45NDA5NzEgMi42NTQwNDcgLTMuMjkxNjU2IDMuMTg4MDQ1IC0zLjI5MTY1NkMzLjQ3NDk2OSAtMy4yOTE2NTYgMy42NDIzNDEgLTMuMTI0Mjg0IDMuNjQyMzQxIC0yLjc0OTY4OUMzLjY0MjM0MSAtMi4zMTEzMzMgMy4zMDc1OTcgLTEuNDAyNzQgMy4xNTYxNjQgLTEuMDEyMjA0QzMuMDUyNTUzIC0wLjc0OTE5MSAzLjA1MjU1MyAtMC43MDEzNyAzLjA1MjU1MyAtMC41OTc3NThDMy4wNTI1NTMgLTAuMTQzNDYyIDMuNDI3MTQ4IDAuMDc5NzAxIDMuNzY5ODYzIDAuMDc5NzAxQzQuNTUwOTM0IDAuMDc5NzAxIDQuODc3NzA5IC0xLjAzNjExNSA0Ljg3NzcwOSAtMS4xMzk3MjZDNC44Nzc3MDkgLTEuMjE5NDI3IDQuODEzOTQ4IC0xLjI0MzMzNyA0Ljc1ODE1NyAtMS4yNDMzMzdDNC42NjI1MTYgLTEuMjQzMzM3IDQuNjQ2NTc1IC0xLjE4NzU0NyA0LjYyMjY2NSAtMS4xMDc4NDZDNC40MzEzODIgLTAuNDU0Mjk2IDQuMDk2NjM4IC0wLjE0MzQ2MiAzLjc5Mzc3MyAtMC4xNDM0NjJDMy42NjYyNTIgLTAuMTQzNDYyIDMuNjAyNDkxIC0wLjIyMzE2MyAzLjYwMjQ5MSAtMC40MDY0NzZTMy42NjYyNTIgLTAuNzY1MTMxIDMuNzQ1OTUzIC0wLjk2NDM4NEMzLjg2NTUwNCAtMS4yNjcyNDggNC4yMTYxODkgLTIuMTgzODExIDQuMjE2MTg5IC0yLjYzMDEzN0M0LjIxNjE4OSAtMy4yMjc4OTUgMy44MDE3NDMgLTMuNTE0ODE5IDMuMjI3ODk1IC0zLjUxNDgxOUMyLjU4MjMxNiAtMy41MTQ4MTkgMi4xNjc4NyAtMy4xMjQyODQgMS45MzY3MzcgLTIuODIxNDJDMS44ODA5NDYgLTMuMjU5Nzc2IDEuNTMwMjYyIC0zLjUxNDgxOSAxLjEyMzc4NiAtMy41MTQ4MTlDMC44MzY4NjIgLTMuNTE0ODE5IDAuNjM3NjA5IC0zLjMzMTUwNyAwLjUxMDA4NyAtMy4wODQ0MzNDMC4zMTg4MDQgLTIuNzA5ODM4IDAuMjM5MTAzIC0yLjMxMTMzMyAwLjIzOTEwMyAtMi4yOTUzOTJDMC4yMzkxMDMgLTIuMjIzNjYxIDAuMjk0ODk0IC0yLjE5MTc4MSAwLjM1ODY1NSAtMi4xOTE3ODFDMC40NjIyNjcgLTIuMTkxNzgxIDAuNDcwMjM3IC0yLjIyMzY2MSAwLjUyNjAyNyAtMi40MzA4ODRDMC42MjE2NjkgLTIuODIxNDIgMC43NjUxMzEgLTMuMjkxNjU2IDEuMDk5ODc1IC0zLjI5MTY1NkMxLjMwNzA5OCAtMy4yOTE2NTYgMS4zNTQ5MTkgLTMuMDkyNDAzIDEuMzU0OTE5IC0yLjkxNzA2MUMxLjM1NDkxOSAtMi43NzM1OTkgMS4zMTUwNjggLTIuNjIyMTY3IDEuMjUxMzA4IC0yLjM1OTE1M0MxLjIzNTM2NyAtMi4yOTUzOTIgMS4xMTU4MTYgLTEuODI1MTU2IDEuMDgzOTM1IC0xLjcxMzU3NEwwLjc4OTA0MSAtMC41MTgwNTdDMC43NTcxNjEgLTAuMzk4NTA2IDAuNzA5MzQgLTAuMTk5MjUzIDAuNzA5MzQgLTAuMTY3MzcyQzAuNzA5MzQgMC4wMTU5NCAwLjg2MDc3MiAwLjA3OTcwMSAwLjk2NDM4NCAwLjA3OTcwMUMxLjEwNzg0NiAwLjA3OTcwMSAxLjIyNzM5NyAtMC4wMTU5NCAxLjI4MzE4OCAtMC4xMTE1ODJDMS4zMDcwOTggLTAuMTU5NDAyIDEuMzcwODU5IC0wLjQzMDM4NiAxLjQxMDcxIC0wLjU5Nzc1OEwxLjU5NDAyMiAtMS4zMDcwOThaJyBpZD0nZzUtMTEwJy8+CjxwYXRoIGQ9J00wLjQxNDQ0NiAwLjk2NDM4NEMwLjM1MDY4NSAxLjIxOTQyNyAwLjMzNDc0NSAxLjI4MzE4OCAwLjAxNTk0IDEuMjgzMTg4Qy0wLjA5NTY0MSAxLjI4MzE4OCAtMC4xOTEyODMgMS4yODMxODggLTAuMTkxMjgzIDEuNDM0NjJDLTAuMTkxMjgzIDEuNTA2MzUxIC0wLjExOTU1MiAxLjU0NjIwMiAtMC4wNzk3MDEgMS41NDYyMDJDMCAxLjU0NjIwMiAwLjAzMTg4IDEuNTIyMjkxIDAuNjIxNjY5IDEuNTIyMjkxQzEuMTk1NTE3IDEuNTIyMjkxIDEuMzYyODg5IDEuNTQ2MjAyIDEuNDE4NjggMS41NDYyMDJDMS40NTA1NiAxLjU0NjIwMiAxLjU3MDExMiAxLjU0NjIwMiAxLjU3MDExMiAxLjM5NDc3QzEuNTcwMTEyIDEuMjgzMTg4IDEuNDU4NTMxIDEuMjgzMTg4IDEuMzYyODg5IDEuMjgzMTg4QzAuOTgwMzI0IDEuMjgzMTg4IDAuOTgwMzI0IDEuMjM1MzY3IDAuOTgwMzI0IDEuMTYzNjM2QzAuOTgwMzI0IDEuMTA3ODQ2IDEuMTIzNzg2IDAuNTQxOTY4IDEuMzYyODg5IC0wLjM5MDUzNUMxLjQ2NjUwMSAtMC4yMDcyMjMgMS43MTM1NzQgMC4wNzk3MDEgMi4xNDM5NiAwLjA3OTcwMUMzLjEyNDI4NCAwLjA3OTcwMSA0LjE0NDQ1OCAtMS4wNTIwNTUgNC4xNDQ0NTggLTIuMjA3NzIxQzQuMTQ0NDU4IC0yLjk5Njc2MiAzLjYzNDM3MSAtMy41MTQ4MTkgMi45OTY3NjIgLTMuNTE0ODE5QzIuNTE4NTU1IC0zLjUxNDgxOSAyLjEzNTk5IC0zLjE4ODA0NSAxLjkwNDg1NyAtMi45NDg5NDFDMS43Mzc0ODQgLTMuNTE0ODE5IDEuMjAzNDg3IC0zLjUxNDgxOSAxLjEyMzc4NiAtMy41MTQ4MTlDMC44MzY4NjIgLTMuNTE0ODE5IDAuNjM3NjA5IC0zLjMzMTUwNyAwLjUxMDA4NyAtMy4wODQ0MzNDMC4zMjY3NzUgLTIuNzI1Nzc4IDAuMjM5MTAzIC0yLjMxOTMwMyAwLjIzOTEwMyAtMi4yOTUzOTJDMC4yMzkxMDMgLTIuMjIzNjYxIDAuMjk0ODk0IC0yLjE5MTc4MSAwLjM1ODY1NSAtMi4xOTE3ODFDMC40NjIyNjcgLTIuMTkxNzgxIDAuNDcwMjM3IC0yLjIyMzY2MSAwLjUyNjAyNyAtMi40MzA4ODRDMC42Mjk2MzkgLTIuODM3MzYgMC43NzMxMDEgLTMuMjkxNjU2IDEuMDk5ODc1IC0zLjI5MTY1NkMxLjI5OTEyOCAtMy4yOTE2NTYgMS4zNTQ5MTkgLTMuMTA4MzQ0IDEuMzU0OTE5IC0yLjkxNzA2MUMxLjM1NDkxOSAtMi44MzczNiAxLjMyMzAzOSAtMi42NDYwNzcgMS4zMDcwOTggLTIuNTgyMzE2TDAuNDE0NDQ2IDAuOTY0Mzg0Wk0xLjg4MDk0NiAtMi40NTQ3OTVDMS45MjA3OTcgLTIuNTkwMjg2IDEuOTIwNzk3IC0yLjYwNjIyNyAyLjA0MDM0OSAtMi43NDk2ODlDMi4zNDMyMTMgLTMuMTA4MzQ0IDIuNjg1OTI4IC0zLjI5MTY1NiAyLjk3Mjg1MiAtMy4yOTE2NTZDMy4zNzEzNTcgLTMuMjkxNjU2IDMuNTIyNzkgLTIuOTAxMTIxIDMuNTIyNzkgLTIuNTQyNDY2QzMuNTIyNzkgLTIuMjQ3NTcyIDMuMzQ3NDQ3IC0xLjM5NDc3IDMuMTA4MzQ0IC0wLjkyNDUzM0MyLjkwMTEyMSAtMC40OTQxNDcgMi41MTg1NTUgLTAuMTQzNDYyIDIuMTQzOTYgLTAuMTQzNDYyQzEuNjAxOTkzIC0wLjE0MzQ2MiAxLjQ3NDQ3MSAtMC43NjUxMzEgMS40NzQ0NzEgLTAuODIwOTIyQzEuNDc0NDcxIC0wLjgzNjg2MiAxLjQ5MDQxMSAtMC45MjQ1MzMgMS40OTgzODEgLTAuOTQ4NDQzTDEuODgwOTQ2IC0yLjQ1NDc5NVonIGlkPSdnNS0xMTInLz4KPHBhdGggZD0nTTIuMTQ1OTUzIC0zLjc5NTc2NkMyLjE0NTk1MyAtMy45NzUwOTMgMi4xMjIwNDIgLTMuOTc1MDkzIDEuOTQyNzE1IC0zLjk3NTA5M0MxLjU0ODE5NCAtMy41OTI1MjggMC45Mzg0ODEgLTMuNTkyNTI4IDAuNzIzMjg4IC0zLjU5MjUyOFYtMy4zNTk0MDJDMC44Nzg3MDUgLTMuMzU5NDAyIDEuMjczMjI1IC0zLjM1OTQwMiAxLjYzMTg4IC0zLjUyNjc3NVYtMC41MDgwOTVDMS42MzE4OCAtMC4zMTA4MzQgMS42MzE4OCAtMC4yMzMxMjYgMS4wMTYxODkgLTAuMjMzMTI2SDAuNzU5MTUzVjBDMS4wODc5MiAtMC4wMjM5MSAxLjU1NDE3MiAtMC4wMjM5MSAxLjg4ODkxNyAtMC4wMjM5MVMyLjY4OTkxMyAtMC4wMjM5MSAzLjAxODY4IDBWLTAuMjMzMTI2SDIuNzYxNjQ0QzIuMTQ1OTUzIC0wLjIzMzEyNiAyLjE0NTk1MyAtMC4zMTA4MzQgMi4xNDU5NTMgLTAuNTA4MDk1Vi0zLjc5NTc2NlonIGlkPSdnNy00OScvPgo8cGF0aCBkPSdNNC43NTgxNTcgLTEuMzM4OTc5QzQuODUzNzk4IC0xLjMzODk3OSA1LjAwMzIzOCAtMS4zMzg5NzkgNS4wMDMyMzggLTEuNDk0Mzk2UzQuODUzNzk4IC0xLjY0OTgxMyA0Ljc1ODE1NyAtMS42NDk4MTNIMC45OTIyNzlDMC44OTY2MzggLTEuNjQ5ODEzIDAuNzQ3MTk4IC0xLjY0OTgxMyAwLjc0NzE5OCAtMS40OTQzOTZTMC44OTY2MzggLTEuMzM4OTc5IDAuOTkyMjc5IC0xLjMzODk3OUg0Ljc1ODE1N1onIGlkPSdnMS0wJy8+CjxwYXRoIGQ9J001LjgxMDIxMiAtMS4zMzg5NzlDNS4wODY5MjQgLTAuODI0OTA3IDQuOTQ5NDQgLTAuMDM1ODY2IDQuOTQ5NDQgLTAuMDA1OTc4QzQuOTQ5NDQgMC4wODk2NjQgNS4wNDUwODEgMC4wODk2NjQgNS4xMDQ4NTcgMC4wODk2NjRDNS4yMzYzNjQgMC4wODk2NjQgNS4yNDIzNDEgMC4wODM2ODYgNS4yODQxODQgLTAuMDg5NjY0QzUuMzkxNzgxIC0wLjUxNDA3MiA1LjY2Njc1IC0wLjgxMjk1MSA1LjY5NjYzOCAtMC44NDg4MTdDNi4wODUxODEgLTEuMjQ5MzE1IDYuNDAxOTkzIC0xLjMzODk3OSA2LjY3Njk2MSAtMS40MTA3MUM2LjcwNjg0OSAtMS40MTY2ODcgNi43NDI3MTUgLTEuNDQ2NTc1IDYuNzQyNzE1IC0xLjQ5NDM5NkM2Ljc0MjcxNSAtMS41NTQxNzIgNi43MDA4NzIgLTEuNTcyMTA1IDYuNjU5MDI5IC0xLjU4NDA2QzUuNzk4MjU3IC0xLjgwNTIzIDUuNDA5NzE0IC0yLjQwODk2NiA1LjI3MjIyOSAtMi45NDA5NzFDNS4yNDIzNDEgLTMuMDYwNTIzIDUuMjM2MzY0IC0zLjA3ODQ1NiA1LjEwNDg1NyAtMy4wNzg0NTZDNS4wMzkxMDMgLTMuMDc4NDU2IDQuOTQ5NDQgLTMuMDc4NDU2IDQuOTQ5NDQgLTIuOTgyODE0QzQuOTQ5NDQgLTIuOTUyOTI3IDUuMDg2OTI0IC0yLjE2Mzg4NSA1LjgxMDIxMiAtMS42NDk4MTNIMC44MDA5OTZDMC43MDUzNTUgLTEuNjQ5ODEzIDAuNTU1OTE1IC0xLjY0OTgxMyAwLjU1NTkxNSAtMS40OTQzOTZTMC43MDUzNTUgLTEuMzM4OTc5IDAuODAwOTk2IC0xLjMzODk3OUg1LjgxMDIxMlonIGlkPSdnMS0zMycvPgo8cGF0aCBkPSdNMi4zMzEyNTggMC4wNDc4MjFDMi4zMzEyNTggLTAuNjQ1NTc5IDIuMTA0MTEgLTEuMTU5NjUxIDEuNjEzOTQ4IC0xLjE1OTY1MUMxLjIzMTM4MiAtMS4xNTk2NTEgMS4wNDAxIC0wLjg0ODgxNyAxLjA0MDEgLTAuNTg1ODAzUzEuMjE5NDI3IDAgMS42MjU5MDMgMEMxLjc4MTMyIDAgMS45MTI4MjcgLTAuMDQ3ODIxIDIuMDIwNDIzIC0wLjE1NTQxN0MyLjA0NDMzNCAtMC4xNzkzMjggMi4wNTYyODkgLTAuMTc5MzI4IDIuMDY4MjQ0IC0wLjE3OTMyOEMyLjA5MjE1NCAtMC4xNzkzMjggMi4wOTIxNTQgLTAuMDExOTU1IDIuMDkyMTU0IDAuMDQ3ODIxQzIuMDkyMTU0IDAuNDQyMzQxIDIuMDIwNDIzIDEuMjE5NDI3IDEuMzI3MDI0IDEuOTk2NTEzQzEuMTk1NTE3IDIuMTM5OTc1IDEuMTk1NTE3IDIuMTYzODg1IDEuMTk1NTE3IDIuMTg3Nzk2QzEuMTk1NTE3IDIuMjQ3NTcyIDEuMjU1MjkzIDIuMzA3MzQ3IDEuMzE1MDY4IDIuMzA3MzQ3QzEuNDEwNzEgMi4zMDczNDcgMi4zMzEyNTggMS40MjI2NjUgMi4zMzEyNTggMC4wNDc4MjFaJyBpZD0nZzYtNTknLz4KPHBhdGggZD0nTTMuNTk4NTA2IC0xLjQyMjY2NUMzLjUzODczIC0xLjIxOTQyNyAzLjUzODczIC0xLjE5NTUxNyAzLjM3MTM1NyAtMC45NjgzNjlDMy4xMDgzNDQgLTAuNjMzNjI0IDIuNTgyMzE2IC0wLjExOTU1MiAyLjAyMDQyMyAtMC4xMTk1NTJDMS41MzAyNjIgLTAuMTE5NTUyIDEuMjU1MjkzIC0wLjU2MTg5MyAxLjI1NTI5MyAtMS4yNjcyNDhDMS4yNTUyOTMgLTEuOTI0NzgyIDEuNjI1OTAzIC0zLjI2Mzc2MSAxLjg1MzA1MSAtMy43NjU4NzhDMi4yNTk1MjcgLTQuNjAyNzQgMi44MjE0MiAtNS4wMzMxMjYgMy4yODc2NzEgLTUuMDMzMTI2QzQuMDc2NzEyIC01LjAzMzEyNiA0LjIzMjEzIC00LjA1MjgwMiA0LjIzMjEzIC0zLjk1NzE2MUM0LjIzMjEzIC0zLjk0NTIwNSA0LjE5NjI2NCAtMy43ODk3ODggNC4xODQzMDkgLTMuNzY1ODc4TDMuNTk4NTA2IC0xLjQyMjY2NVpNNC4zNjM2MzYgLTQuNDgzMTg4QzQuMjMyMTMgLTQuNzk0MDIyIDMuOTA5MzQgLTUuMjcyMjI5IDMuMjg3NjcxIC01LjI3MjIyOUMxLjkzNjczNyAtNS4yNzIyMjkgMC40NzgyMDcgLTMuNTI2Nzc1IDAuNDc4MjA3IC0xLjc1NzQxQzAuNDc4MjA3IC0wLjU3Mzg0OCAxLjE3MTYwNiAwLjExOTU1MiAxLjk4NDU1OCAwLjExOTU1MkMyLjY0MjA5MiAwLjExOTU1MiAzLjIwMzk4NSAtMC4zOTQ1MjEgMy41Mzg3MyAtMC43ODkwNDFDMy42NTgyODEgLTAuMDgzNjg2IDQuMjIwMTc0IDAuMTE5NTUyIDQuNTc4ODI5IDAuMTE5NTUyUzUuMjI0NDA4IC0wLjA5NTY0MSA1LjQzOTYwMSAtMC41MjYwMjdDNS42MzA4ODQgLTAuOTMyNTAzIDUuNzk4MjU3IC0xLjY2MTc2OCA1Ljc5ODI1NyAtMS43MDk1ODlDNS43OTgyNTcgLTEuNzY5MzY1IDUuNzUwNDM2IC0xLjgxNzE4NiA1LjY3ODcwNSAtMS44MTcxODZDNS41NzExMDggLTEuODE3MTg2IDUuNTU5MTUzIC0xLjc1NzQxIDUuNTExMzMzIC0xLjU3ODA4MkM1LjMzMjAwNSAtMC44NzI3MjcgNS4xMDQ4NTcgLTAuMTE5NTUyIDQuNjE0Njk1IC0wLjExOTU1MkM0LjI2Nzk5NSAtMC4xMTk1NTIgNC4yNDQwODUgLTAuNDMwMzg2IDQuMjQ0MDg1IC0wLjY2OTQ4OUM0LjI0NDA4NSAtMC45NDQ0NTggNC4yNzk5NSAtMS4wNzU5NjUgNC4zODc1NDcgLTEuNTQyMjE3QzQuNDcxMjMzIC0xLjg0MTA5NiA0LjUzMTAwOSAtMi4xMDQxMSA0LjYyNjY1IC0yLjQ1MDgwOUM1LjA2ODk5MSAtNC4yNDQwODUgNS4xNzY1ODggLTQuNjc0NDcxIDUuMTc2NTg4IC00Ljc0NjIwMkM1LjE3NjU4OCAtNC45MTM1NzQgNS4wNDUwODEgLTUuMDQ1MDgxIDQuODY1NzUzIC01LjA0NTA4MUM0LjQ4MzE4OCAtNS4wNDUwODEgNC4zODc1NDcgLTQuNjI2NjUgNC4zNjM2MzYgLTQuNDgzMTg4WicgaWQ9J2c2LTk3Jy8+CjxwYXRoIGQ9J00zLjM1OTQwMiAtNy45OTgwMDdDMy4zNzEzNTcgLTguMDQ1ODI4IDMuMzk1MjY4IC04LjExNzU1OSAzLjM5NTI2OCAtOC4xNzczMzVDMy4zOTUyNjggLTguMjk2ODg3IDMuMjc1NzE2IC04LjI5Njg4NyAzLjI1MTgwNiAtOC4yOTY4ODdDMy4yMzk4NTEgLTguMjk2ODg3IDIuODA5NDY1IC04LjI2MTAyMSAyLjU5NDI3MSAtOC4yMzcxMTFDMi4zOTEwMzQgLTguMjI1MTU2IDIuMjExNzA2IC04LjIwMTI0NSAxLjk5NjUxMyAtOC4xODkyOUMxLjcwOTU4OSAtOC4xNjUzOCAxLjYyNTkwMyAtOC4xNTM0MjUgMS42MjU5MDMgLTcuOTM4MjMyQzEuNjI1OTAzIC03LjgxODY4IDEuNzQ1NDU1IC03LjgxODY4IDEuODY1MDA2IC03LjgxODY4QzIuNDc0NzIgLTcuODE4NjggMi40NzQ3MiAtNy43MTEwODMgMi40NzQ3MiAtNy41OTE1MzJDMi40NzQ3MiAtNy41NDM3MTEgMi40NzQ3MiAtNy41MTk4MDEgMi40MTQ5NDQgLTcuMzA0NjA4TDAuNzA1MzU1IC0wLjQ2NjI1MkMwLjY1NzUzNCAtMC4yODY5MjQgMC42NTc1MzQgLTAuMjYzMDE0IDAuNjU3NTM0IC0wLjE5MTI4M0MwLjY1NzUzNCAwLjA3MTczMSAwLjg2MDc3MiAwLjExOTU1MiAwLjk4MDMyNCAwLjExOTU1MkMxLjMxNTA2OCAwLjExOTU1MiAxLjM4NjggLTAuMTQzNDYyIDEuNDgyNDQxIC0wLjUxNDA3MkwyLjA0NDMzNCAtMi43NDk2ODlDMi45MDUxMDYgLTIuNjU0MDQ3IDMuNDE5MTc4IC0yLjI5NTM5MiAzLjQxOTE3OCAtMS43MjE1NDRDMy40MTkxNzggLTEuNjQ5ODEzIDMuNDE5MTc4IC0xLjYwMTk5MyAzLjM4MzMxMyAtMS40MjI2NjVDMy4zMzU0OTIgLTEuMjQzMzM3IDMuMzM1NDkyIC0xLjA5OTg3NSAzLjMzNTQ5MiAtMS4wNDAxQzMuMzM1NDkyIC0wLjM0NjcgMy43ODk3ODggMC4xMTk1NTIgNC4zOTk1MDIgMC4xMTk1NTJDNC45NDk0NCAwLjExOTU1MiA1LjIzNjM2NCAtMC4zODI1NjUgNS4zMzIwMDUgLTAuNTQ5OTM4QzUuNTgzMDY0IC0wLjk5MjI3OSA1LjczODQ4MSAtMS42NjE3NjggNS43Mzg0ODEgLTEuNzA5NTg5QzUuNzM4NDgxIC0xLjc2OTM2NSA1LjY5MDY2IC0xLjgxNzE4NiA1LjYxODkyOSAtMS44MTcxODZDNS41MTEzMzMgLTEuODE3MTg2IDUuNDk5Mzc3IC0xLjc2OTM2NSA1LjQ1MTU1NyAtMS41NzgwODJDNS4yODQxODQgLTAuOTU2NDEzIDUuMDMzMTI2IC0wLjExOTU1MiA0LjQyMzQxMiAtMC4xMTk1NTJDNC4xODQzMDkgLTAuMTE5NTUyIDQuMDI4ODkyIC0wLjIzOTEwMyA0LjAyODg5MiAtMC42OTM0QzQuMDI4ODkyIC0wLjkyMDU0OCA0LjA3NjcxMiAtMS4xODM1NjIgNC4xMjQ1MzMgLTEuMzYyODg5QzQuMTcyMzU0IC0xLjU3ODA4MiA0LjE3MjM1NCAtMS41OTAwMzcgNC4xNzIzNTQgLTEuNzMzNDk5QzQuMTcyMzU0IC0yLjQzODg1NCAzLjUzODczIC0yLjgzMzM3NSAyLjQzODg1NCAtMi45NzY4MzdDMi44NjkyNCAtMy4yMzk4NTEgMy4yOTk2MjYgLTMuNzA2MTAyIDMuNDY2OTk5IC0zLjg4NTQzQzQuMTQ4NDQzIC00LjY1MDU2IDQuNjE0Njk1IC01LjAzMzEyNiA1LjE2NDYzMyAtNS4wMzMxMjZDNS40Mzk2MDEgLTUuMDMzMTI2IDUuNTExMzMzIC00Ljk2MTM5NSA1LjU5NTAxOSAtNC44ODk2NjRDNS4xNTI2NzcgLTQuODQxODQzIDQuOTg1MzA1IC00LjUzMTAwOSA0Ljk4NTMwNSAtNC4yOTE5MDVDNC45ODUzMDUgLTQuMDA0OTgxIDUuMjEyNDUzIC0zLjkwOTM0IDUuMzc5ODI2IC0zLjkwOTM0QzUuNzAyNjE1IC0zLjkwOTM0IDUuOTg5NTM5IC00LjE4NDMwOSA1Ljk4OTUzOSAtNC41NjY4NzRDNS45ODk1MzkgLTQuOTEzNTc0IDUuNzE0NTcgLTUuMjcyMjI5IDUuMTc2NTg4IC01LjI3MjIyOUM0LjUxOTA1NCAtNS4yNzIyMjkgMy45ODEwNzEgLTQuODA1OTc4IDMuMTMyMjU0IC0zLjg0OTU2NEMzLjAxMjcwMiAtMy43MDYxMDIgMi41NzAzNjEgLTMuMjUxODA2IDIuMTI4MDIgLTMuMDg0NDMzTDMuMzU5NDAyIC03Ljk5ODAwN1onIGlkPSdnNi0xMDcnLz4KPHBhdGggZD0nTTAuNTE0MDcyIDEuNTE4MzA2QzAuNDMwMzg2IDEuODc2OTYxIDAuMzgyNTY1IDEuOTcyNjAzIC0wLjEwNzU5NyAxLjk3MjYwM0MtMC4yNTEwNTkgMS45NzI2MDMgLTAuMzcwNjEgMS45NzI2MDMgLTAuMzcwNjEgMi4xOTk3NTFDLTAuMzcwNjEgMi4yMjM2NjEgLTAuMzU4NjU1IDIuMzE5MzAzIC0wLjIyNzE0OCAyLjMxOTMwM0MtMC4wNzE3MzEgMi4zMTkzMDMgMC4wOTU2NDEgMi4yOTUzOTIgMC4yNTEwNTkgMi4yOTUzOTJIMC43NjUxMzFDMS4wMTYxODkgMi4yOTUzOTIgMS42MjU5MDMgMi4zMTkzMDMgMS44NzY5NjEgMi4zMTkzMDNDMS45NDg2OTIgMi4zMTkzMDMgMi4wOTIxNTQgMi4zMTkzMDMgMi4wOTIxNTQgMi4xMDQxMUMyLjA5MjE1NCAxLjk3MjYwMyAyLjAwODQ2OCAxLjk3MjYwMyAxLjgwNTIzIDEuOTcyNjAzQzEuMjU1MjkzIDEuOTcyNjAzIDEuMjE5NDI3IDEuODg4OTE3IDEuMjE5NDI3IDEuNzkzMjc1QzEuMjE5NDI3IDEuNjQ5ODEzIDEuNzU3NDEgLTAuNDA2NDc2IDEuODI5MTQxIC0wLjY4MTQ0NUMxLjk2MDY0OCAtMC4zNDY3IDIuMjgzNDM3IDAuMTE5NTUyIDIuOTA1MTA2IDAuMTE5NTUyQzQuMjU2MDQgMC4xMTk1NTIgNS43MTQ1NyAtMS42Mzc4NTggNS43MTQ1NyAtMy4zOTUyNjhDNS43MTQ1NyAtNC40OTUxNDMgNS4wOTI5MDIgLTUuMjcyMjI5IDQuMTk2MjY0IC01LjI3MjIyOUMzLjQzMTEzMyAtNS4yNzIyMjkgMi43ODU1NTQgLTQuNTMxMDA5IDIuNjU0MDQ3IC00LjM2MzYzNkMyLjU1ODQwNiAtNC45NjEzOTUgMi4wOTIxNTQgLTUuMjcyMjI5IDEuNjEzOTQ4IC01LjI3MjIyOUMxLjI2NzI0OCAtNS4yNzIyMjkgMC45OTIyNzkgLTUuMTA0ODU3IDAuNzY1MTMxIC00LjY1MDU2QzAuNTQ5OTM4IC00LjIyMDE3NCAwLjM4MjU2NSAtMy40OTA5MDkgMC4zODI1NjUgLTMuNDQzMDg4UzAuNDMwMzg2IC0zLjMzNTQ5MiAwLjUxNDA3MiAtMy4zMzU0OTJDMC42MDk3MTQgLTMuMzM1NDkyIDAuNjIxNjY5IC0zLjM0NzQ0NyAwLjY5MzQgLTMuNjIyNDE2QzAuODcyNzI3IC00LjMyNzc3MSAxLjA5OTg3NSAtNS4wMzMxMjYgMS41NzgwODIgLTUuMDMzMTI2QzEuODUzMDUxIC01LjAzMzEyNiAxLjk0ODY5MiAtNC44NDE4NDMgMS45NDg2OTIgLTQuNDgzMTg4QzEuOTQ4NjkyIC00LjE5NjI2NCAxLjkxMjgyNyAtNC4wNzY3MTIgMS44NjUwMDYgLTMuODYxNTE5TDAuNTE0MDcyIDEuNTE4MzA2Wk0yLjU4MjMxNiAtMy43MzAwMTJDMi42NjYwMDIgLTQuMDY0NzU3IDMuMDAwNzQ3IC00LjQxMTQ1NyAzLjE5MjAzIC00LjU3ODgyOUMzLjMyMzUzNyAtNC42OTgzODEgMy43MTgwNTcgLTUuMDMzMTI2IDQuMTcyMzU0IC01LjAzMzEyNkM0LjY5ODM4MSAtNS4wMzMxMjYgNC45Mzc0ODQgLTQuNTA3MDk4IDQuOTM3NDg0IC0zLjg4NTQzQzQuOTM3NDg0IC0zLjMxMTU4MiA0LjYwMjc0IC0xLjk2MDY0OCA0LjMwMzg2MSAtMS4zMzg5NzlDNC4wMDQ5ODEgLTAuNjkzNCAzLjQ1NTA0NCAtMC4xMTk1NTIgMi45MDUxMDYgLTAuMTE5NTUyQzIuMDkyMTU0IC0wLjExOTU1MiAxLjk2MDY0OCAtMS4xNDc2OTYgMS45NjA2NDggLTEuMTk1NTE3QzEuOTYwNjQ4IC0xLjIzMTM4MiAxLjk4NDU1OCAtMS4zMjcwMjQgMS45OTY1MTMgLTEuMzg2OEwyLjU4MjMxNiAtMy43MzAwMTJaJyBpZD0nZzYtMTEyJy8+CjxwYXRoIGQ9J003Ljg3ODQ1NiAtMi43NDk2ODlDOC4wODE2OTQgLTIuNzQ5Njg5IDguMjk2ODg3IC0yLjc0OTY4OSA4LjI5Njg4NyAtMi45ODg3OTJTOC4wODE2OTQgLTMuMjI3ODk1IDcuODc4NDU2IC0zLjIyNzg5NUgxLjQxMDcxQzEuMjA3NDcyIC0zLjIyNzg5NSAwLjk5MjI3OSAtMy4yMjc4OTUgMC45OTIyNzkgLTIuOTg4NzkyUzEuMjA3NDcyIC0yLjc0OTY4OSAxLjQxMDcxIC0yLjc0OTY4OUg3Ljg3ODQ1NlonIGlkPSdnMy0wJy8+CjxwYXRoIGQ9J00xMC44NTUyOTMgLTIuNzQ5Njg5QzExLjA3MDQ4NiAtMi43NDk2ODkgMTEuMjg1Njc5IC0yLjc0OTY4OSAxMS4yODU2NzkgLTIuOTg4NzkyUzExLjA3MDQ4NiAtMy4yMjc4OTUgMTAuODU1MjkzIC0zLjIyNzg5NUgxLjk3MjYwM0MyLjYzMDEzNyAtMy43MzAwMTIgMi45NTI5MjcgLTQuMjIwMTc0IDMuMDQ4NTY4IC00LjM3NTU5MkMzLjU4NjU1IC01LjIwMDQ5OCAzLjY4MjE5MiAtNS45NTM2NzQgMy42ODIxOTIgLTUuOTY1NjI5QzMuNjgyMTkyIC02LjEwOTA5MSAzLjUzODczIC02LjEwOTA5MSAzLjQ0MzA4OCAtNi4xMDkwOTFDMy4yMzk4NTEgLTYuMTA5MDkxIDMuMjI3ODk1IC02LjA4NTE4MSAzLjE4MDA3NSAtNS44Njk5ODhDMi45MDUxMDYgLTQuNjk4MzgxIDIuMTk5NzUxIC0zLjcwNjEwMiAwLjg0ODgxNyAtMy4xNDQyMDlDMC43MTczMSAtMy4wOTYzODkgMC42Njk0ODkgLTMuMDcyNDc4IDAuNjY5NDg5IC0yLjk4ODc5MlMwLjcyOTI2NSAtMi44ODExOTYgMC44NDg4MTcgLTIuODMzMzc1QzIuMDkyMTU0IC0yLjMxOTMwMyAyLjg5MzE1MSAtMS4zODY4IDMuMTkyMDMgLTAuMDQ3ODIxQzMuMjI3ODk1IDAuMDk1NjQxIDMuMjM5ODUxIDAuMTMxNTA3IDMuNDQzMDg4IDAuMTMxNTA3QzMuNTM4NzMgMC4xMzE1MDcgMy42ODIxOTIgMC4xMzE1MDcgMy42ODIxOTIgLTAuMDExOTU1QzMuNjgyMTkyIC0wLjAzNTg2NiAzLjU3NDU5NSAtMC43ODkwNDEgMy4wNzI0NzggLTEuNTkwMDM3QzIuODMzMzc1IC0xLjk0ODY5MiAyLjQ4NjY3NSAtMi4zNjcxMjMgMS45NzI2MDMgLTIuNzQ5Njg5SDEwLjg1NTI5M1onIGlkPSdnMy0zMicvPgo8cGF0aCBkPSdNMi4wNTYyODkgLTguNTU5OUMyLjA1NjI4OSAtOC43NTExODMgMi4wNTYyODkgLTguOTY2Mzc2IDEuODE3MTg2IC04Ljk2NjM3NlMxLjU3ODA4MiAtOC43MDMzNjIgMS41NzgwODIgLTguNTI0MDM1VjIuNTQ2NDUxQzEuNTc4MDgyIDIuNzM3NzMzIDEuNTc4MDgyIDIuOTg4NzkyIDEuODE3MTg2IDIuOTg4NzkyUzIuMDU2Mjg5IDIuNzczNTk5IDIuMDU2Mjg5IDIuNTgyMzE2Vi04LjU1OTlaTTQuMzg3NTQ3IC04LjUyNDAzNUM0LjM4NzU0NyAtOC43MTUzMTggNC4zODc1NDcgLTguOTY2Mzc2IDQuMTQ4NDQzIC04Ljk2NjM3NlMzLjkwOTM0IC04Ljc1MTE4MyAzLjkwOTM0IC04LjU1OTlWMi41ODIzMTZDMy45MDkzNCAyLjc3MzU5OSAzLjkwOTM0IDIuOTg4NzkyIDQuMTQ4NDQzIDIuOTg4NzkyUzQuMzg3NTQ3IDIuNzI1Nzc4IDQuMzg3NTQ3IDIuNTQ2NDUxVi04LjUyNDAzNVonIGlkPSdnMy0xMDcnLz4KPHBhdGggZD0nTTQuNzcwMTEyIC0yLjc2MTY0NEg4LjA2OTczOEM4LjIzNzExMSAtMi43NjE2NDQgOC40NTIzMDQgLTIuNzYxNjQ0IDguNDUyMzA0IC0yLjk3NjgzN0M4LjQ1MjMwNCAtMy4yMDM5ODUgOC4yNDkwNjYgLTMuMjAzOTg1IDguMDY5NzM4IC0zLjIwMzk4NUg0Ljc3MDExMlYtNi41MDM2MTFDNC43NzAxMTIgLTYuNjcwOTg0IDQuNzcwMTEyIC02Ljg4NjE3NyA0LjU1NDkxOSAtNi44ODYxNzdDNC4zMjc3NzEgLTYuODg2MTc3IDQuMzI3NzcxIC02LjY4MjkzOSA0LjMyNzc3MSAtNi41MDM2MTFWLTMuMjAzOTg1SDEuMDI4MTQ0QzAuODYwNzcyIC0zLjIwMzk4NSAwLjY0NTU3OSAtMy4yMDM5ODUgMC42NDU1NzkgLTIuOTg4NzkyQzAuNjQ1NTc5IC0yLjc2MTY0NCAwLjg0ODgxNyAtMi43NjE2NDQgMS4wMjgxNDQgLTIuNzYxNjQ0SDQuMzI3NzcxVjAuNTM3OTgzQzQuMzI3NzcxIDAuNzA1MzU1IDQuMzI3NzcxIDAuOTIwNTQ4IDQuNTQyOTY0IDAuOTIwNTQ4QzQuNzcwMTEyIDAuOTIwNTQ4IDQuNzcwMTEyIDAuNzE3MzEgNC43NzAxMTIgMC41Mzc5ODNWLTIuNzYxNjQ0WicgaWQ9J2c5LTQzJy8+CjxwYXRoIGQ9J00xLjczMzQ5OSA2Ljk4MTgxOEMxLjczMzQ5OSA3LjE3MzEwMSAxLjczMzQ5OSA3LjQyNDE1OSAxLjk4NDU1OCA3LjQyNDE1OUMyLjI0NzU3MiA3LjQyNDE1OSAyLjI0NzU3MiA3LjE4NTA1NiAyLjI0NzU3MiA2Ljk4MTgxOFYwLjE5MTI4M0MyLjI0NzU3MiAwIDIuMjQ3NTcyIC0wLjI1MTA1OSAxLjk5NjUxMyAtMC4yNTEwNTlDMS43MzM0OTkgLTAuMjUxMDU5IDEuNzMzNDk5IC0wLjAxMTk1NSAxLjczMzQ5OSAwLjE5MTI4M1Y2Ljk4MTgxOFpNNC4zODc1NDcgNi45ODE4MThDNC4zODc1NDcgNy4xNzMxMDEgNC4zODc1NDcgNy40MjQxNTkgNC42Mzg2MDUgNy40MjQxNTlDNC45MDE2MTkgNy40MjQxNTkgNC45MDE2MTkgNy4xODUwNTYgNC45MDE2MTkgNi45ODE4MThWMC4xOTEyODNDNC45MDE2MTkgMCA0LjkwMTYxOSAtMC4yNTEwNTkgNC42NTA1NiAtMC4yNTEwNTlDNC4zODc1NDcgLTAuMjUxMDU5IDQuMzg3NTQ3IC0wLjAxMTk1NSA0LjM4NzU0NyAwLjE5MTI4M1Y2Ljk4MTgxOFonIGlkPSdnMC0xMycvPgo8cGF0aCBkPSdNMi43MDE4NjggMjEuMDI5MTQxSDUuNDE1NjkxVjIwLjQ2NzI0OEgzLjI2Mzc2MVYwLjA4MzY4Nkg1LjQxNTY5MVYtMC40NzgyMDdIMi43MDE4NjhWMjEuMDI5MTQxWicgaWQ9J2cwLTEwNCcvPgo8cGF0aCBkPSdNMi4zNjcxMjMgMjAuNDY3MjQ4SDAuMjE1MTkzVjIxLjAyOTE0MUgyLjkyOTAxNlYtMC40NzgyMDdIMC4yMTUxOTNWMC4wODM2ODZIMi4zNjcxMjNWMjAuNDY3MjQ4WicgaWQ9J2cwLTEwNScvPgo8cGF0aCBkPSdNNS41NzExMDggLTEuODA5MjE1QzUuNjk4NjMgLTEuODA5MjE1IDUuODczOTczIC0xLjgwOTIxNSA1Ljg3Mzk3MyAtMS45OTI1MjhTNS42OTg2MyAtMi4xNzU4NDEgNS41NzExMDggLTIuMTc1ODQxSDEuMDA0MjM0QzAuODc2NzEyIC0yLjE3NTg0MSAwLjcwMTM3IC0yLjE3NTg0MSAwLjcwMTM3IC0xLjk5MjUyOFMwLjg3NjcxMiAtMS44MDkyMTUgMS4wMDQyMzQgLTEuODA5MjE1SDUuNTcxMTA4WicgaWQ9J2cyLTAnLz4KPHBhdGggZD0nTTYuOTU3OTA4IC0xLjgwOTIxNUM2LjY4NjkyNCAtMS42MDk5NjMgNi40Mzk4NTEgLTEuMzU0OTE5IDYuMjQ4NTY4IC0xLjA2Nzk5NUM1LjkwNTg1MyAtMC41NDk5MzggNS44MTgxODIgLTAuMDM5ODUxIDUuODE4MTgyIC0wLjAwNzk3QzUuODE4MTgyIDAuMTExNTgyIDUuOTI5NzYzIDAuMTExNTgyIDYuMDAxNDk0IDAuMTExNTgyQzYuMDg5MTY2IDAuMTExNTgyIDYuMTYwODk3IDAuMTExNTgyIDYuMTg0ODA3IDAuMDA3OTdDNi4zOTIwMyAtMC44NzY3MTIgNi45MDIxMTcgLTEuNTQ2MjAyIDcuODY2NTAxIC0xLjg3Mjk3NkM3LjkzMDI2MiAtMS44ODg5MTcgNy45OTQwMjIgLTEuOTEyODI3IDcuOTk0MDIyIC0xLjk5MjUyOFM3LjkyMjI5MSAtMi4wOTYxMzkgNy44OTA0MTEgLTIuMTA0MTFDNi44MzAzODYgLTIuNDYyNzY1IDYuMzY4MTIgLTMuMjExOTU1IDYuMjAwNzQ3IC0zLjkxMzMyNUM2LjE2MDg5NyAtNC4wNzI3MjcgNi4xNjA4OTcgLTQuMDk2NjM4IDYuMDAxNDk0IC00LjA5NjYzOEM1LjkyOTc2MyAtNC4wOTY2MzggNS44MTgxODIgLTQuMDk2NjM4IDUuODE4MTgyIC0zLjk3NzA4NkM1LjgxODE4MiAtMy45NjExNDYgNS44OTc4ODMgLTMuNDM1MTE4IDYuMjQ4NTY4IC0yLjkwOTA5MUM2LjQ3OTcwMSAtMi41NzQzNDYgNi43NTg2NTUgLTIuMzI3MjczIDYuOTU3OTA4IC0yLjE3NTg0MUgwLjc3MzEwMUMwLjY0NTU3OSAtMi4xNzU4NDEgMC40NzAyMzcgLTIuMTc1ODQxIDAuNDcwMjM3IC0xLjk5MjUyOFMwLjY0NTU3OSAtMS44MDkyMTUgMC43NzMxMDEgLTEuODA5MjE1SDYuOTU3OTA4WicgaWQ9J2cyLTMzJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSc1Ni40MTMyNjcnIHhsaW5rOmhyZWY9JyNnNi05NycgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nNjIuNTU4MjExJyB4bGluazpocmVmPScjZzUtMTA1JyB5PSc2OS42OTU1ODEnLz4KPHVzZSB4PSc2OS4yNjAzMTInIHhsaW5rOmhyZWY9JyNnMy0zMicgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nNzkuMjIzMDE3JyB4bGluazpocmVmPScjZzMtMCcgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nOTEuODQyMzM2JyB4bGluazpocmVmPScjZzYtOTcnIHk9JzY3LjkwMjMxOCcvPgo8dXNlIHg9Jzk3Ljk4NzI4JyB4bGluazpocmVmPScjZzUtMTA1JyB5PSc2OS42OTU1ODEnLz4KPHVzZSB4PScxMDQuMDI1MjE1JyB4bGluazpocmVmPScjZzktNDMnIHk9JzY3LjkwMjMxOCcvPgo8dXNlIHg9JzExNS43ODY1MycgeGxpbms6aHJlZj0nI2c2LTEwNycgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nMTI0LjI2ODUzMicgeGxpbms6aHJlZj0nI2cwLTEwNCcgeT0nNTQuNjMxOTY4Jy8+Cjx1c2UgeD0nMTI5LjkxNDA0OCcgeGxpbms6aHJlZj0nI2cwLTEzJyB5PSc1NC4xNTM3NjUnLz4KPHVzZSB4PScxMjkuOTE0MDQ4JyB4bGluazpocmVmPScjZzAtMTMnIHk9JzYxLjMyNjkzOScvPgo8dXNlIHg9JzEyOS45MTQwNDgnIHhsaW5rOmhyZWY9JyNnMC0xMycgeT0nNjguNTAwMTEzJy8+Cjx1c2UgeD0nMTQ3LjAyMjkyNScgeGxpbms6aHJlZj0nI2cyLTAnIHk9JzYwLjM2MzkyMicvPgo8dXNlIHg9JzE1Mi4xOTgwMzcnIHhsaW5rOmhyZWY9JyNnMi0zMycgeT0nNjAuMzYzOTIyJy8+Cjx1c2UgeD0nMTM2LjU1NTgyOScgeGxpbms6aHJlZj0nI2c2LTExMicgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nMTQyLjQzMDk3MicgeGxpbms6aHJlZj0nI2c1LTEwNScgeT0nNjkuNjk1NTgxJy8+Cjx1c2UgeD0nMTQ1LjMxNDExMScgeGxpbms6aHJlZj0nI2cyLTAnIHk9JzY5LjY5NTU4MScvPgo8dXNlIHg9JzE1MS45MDA2MTgnIHhsaW5rOmhyZWY9JyNnOC00OScgeT0nNjkuNjk1NTgxJy8+Cjx1c2UgeD0nMTU2LjYzMjkzMycgeGxpbms6aHJlZj0nI2c2LTU5JyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxNjEuODc3MDkyJyB4bGluazpocmVmPScjZzYtMTEyJyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxNjcuNzUyMjM1JyB4bGluazpocmVmPScjZzUtMTA1JyB5PSc2OS42OTU1ODEnLz4KPHVzZSB4PScxNzEuMTMzNDk5JyB4bGluazpocmVmPScjZzAtMTMnIHk9JzU0LjE1Mzc2NScvPgo8dXNlIHg9JzE3MS4xMzM0OTknIHhsaW5rOmhyZWY9JyNnMC0xMycgeT0nNjEuMzI2OTM5Jy8+Cjx1c2UgeD0nMTcxLjEzMzQ5OScgeGxpbms6aHJlZj0nI2cwLTEzJyB5PSc2OC41MDAxMTMnLz4KPHVzZSB4PScxODAuNDMxOTQzJyB4bGluazpocmVmPScjZzMtMCcgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nMTk4LjY4MjU0MScgeGxpbms6aHJlZj0nI2c1LTc2JyB5PSc2My4xOTUxOTMnLz4KPHJlY3QgaGVpZ2h0PScwLjQ3ODE4Nycgd2lkdGg9JzE1Ljk1ODg5MicgeD0nMTkzLjU4MjYxNycgeT0nNjQuNjc0NDMzJy8+Cjx1c2UgeD0nMTkzLjU4MjYxNycgeGxpbms6aHJlZj0nI2c1LTExMCcgeT0nNzIuMDI0OTUnLz4KPHVzZSB4PScxOTguNzIwODE5JyB4bGluazpocmVmPScjZzItMCcgeT0nNzIuMDI0OTUnLz4KPHVzZSB4PScyMDUuMzA3MzI2JyB4bGluazpocmVmPScjZzgtNDknIHk9JzcyLjAyNDk1Jy8+Cjx1c2UgeD0nMjEwLjczNzAyMycgeGxpbms6aHJlZj0nI2cwLTEwNScgeT0nNTQuNjMxOTY4Jy8+Cjx1c2UgeD0nMjMyLjk1ODg0NCcgeGxpbms6aHJlZj0nI2cxLTAnIHk9JzU3LjEyNTM2NCcvPgo8dXNlIHg9JzIzNy40NDIwMDEnIHhsaW5rOmhyZWY9JyNnMS0zMycgeT0nNTcuMTI1MzY0Jy8+Cjx1c2UgeD0nMjI1LjU0ODE0MicgeGxpbms6aHJlZj0nI2c1LTExMicgeT0nNjIuMTUwOTY3Jy8+Cjx1c2UgeD0nMjI5LjgxMDkxOScgeGxpbms6aHJlZj0nI2c0LTEwNScgeT0nNjMuMzY2MDQ2Jy8+Cjx1c2UgeD0nMjMyLjQ3NDU0NScgeGxpbms6aHJlZj0nI2cxLTAnIHk9JzYzLjM2NjA0NicvPgo8dXNlIHg9JzIzOC4yMzA2OTgnIHhsaW5rOmhyZWY9JyNnNy00OScgeT0nNjMuMzY2MDQ2Jy8+Cjx1c2UgeD0nMjQyLjM4MTcyOScgeGxpbms6aHJlZj0nI2c1LTU5JyB5PSc2Mi4xNTA5NjcnLz4KPHVzZSB4PScyNDQuNzM0MDUzJyB4bGluazpocmVmPScjZzUtMTEyJyB5PSc2Mi4xNTA5NjcnLz4KPHVzZSB4PScyNDguOTk2ODMxJyB4bGluazpocmVmPScjZzQtMTA1JyB5PSc2My4zNjYwNDYnLz4KPHJlY3QgaGVpZ2h0PScwLjQ3ODE4Nycgd2lkdGg9JzM4LjU2NTY0NScgeD0nMjE5LjU3MDU0MycgeT0nNjQuNjc0NDMzJy8+Cjx1c2UgeD0nMjE5LjU3MDU0MycgeGxpbms6aHJlZj0nI2czLTEwNycgeT0nNzQuOTc5NzgyJy8+Cjx1c2UgeD0nMjMyLjk1ODg0NCcgeGxpbms6aHJlZj0nI2cxLTAnIHk9JzY4Ljk1NzkxNScvPgo8dXNlIHg9JzIzNy40NDIwMDEnIHhsaW5rOmhyZWY9JyNnMS0zMycgeT0nNjguOTU3OTE1Jy8+Cjx1c2UgeD0nMjI1LjU0ODE0MicgeGxpbms6aHJlZj0nI2c1LTExMicgeT0nNzMuOTgzNTE4Jy8+Cjx1c2UgeD0nMjI5LjgxMDkxOScgeGxpbms6aHJlZj0nI2c0LTEwNScgeT0nNzUuMTk4NTk2Jy8+Cjx1c2UgeD0nMjMyLjQ3NDU0NScgeGxpbms6aHJlZj0nI2cxLTAnIHk9Jzc1LjE5ODU5NicvPgo8dXNlIHg9JzIzOC4yMzA2OTgnIHhsaW5rOmhyZWY9JyNnNy00OScgeT0nNzUuMTk4NTk2Jy8+Cjx1c2UgeD0nMjQyLjM4MTcyOScgeGxpbms6aHJlZj0nI2c1LTU5JyB5PSc3My45ODM1MTgnLz4KPHVzZSB4PScyNDQuNzM0MDUzJyB4bGluazpocmVmPScjZzUtMTEyJyB5PSc3My45ODM1MTgnLz4KPHVzZSB4PScyNDguOTk2ODMxJyB4bGluazpocmVmPScjZzQtMTA1JyB5PSc3NS4xOTg1OTYnLz4KPHVzZSB4PScyNTIuMTU4NTg4JyB4bGluazpocmVmPScjZzMtMTA3JyB5PSc3NC45Nzk3ODInLz4KPC9nPgo8L3N2Zz4=) .
.Si
 alors
alors
![a_i \longleftarrow a_i + k \left[ \left\Vert\overset{\longrightarrow}{p_{i+1},p_i }\right\Vert - \frac{L}{n-1} \right] \frac{\overset{\longrightarrow}{p_{i+1},p_i }}{ \left\Vert\overset{\longrightarrow}{p_{i+1},p_i }\right\Vert }](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuNi4xIC0tPgo8c3ZnIGhlaWdodD0nMjQuNjYyMjAxcHQnIHZlcnNpb249JzEuMScgdmlld0JveD0nNTYuNDEzMjY3IDUzLjMwNjM3MiAyMDEuNTU2ODc5IDI0LjY2MjIwMScgd2lkdGg9JzIwMS41NTY4NzlwdCcgeG1sbnM9J2h0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnJyB4bWxuczp4bGluaz0naHR0cDovL3d3dy53My5vcmcvMTk5OS94bGluayc+CjxkZWZzPgo8cGF0aCBkPSdNMi4wODAxOTkgLTMuNzMwMDEyQzIuMDgwMTk5IC0zLjg3MzQ3NCAxLjk3MjYwMyAtMy45NjkxMTYgMS44MzUxMTggLTMuOTY5MTE2QzEuNjczNzI0IC0zLjk2OTExNiAxLjUwMDM3NCAtMy44MTM2OTkgMS41MDAzNzQgLTMuNjQwMzQ5QzEuNTAwMzc0IC0zLjQ5MDkwOSAxLjYwNzk3IC0zLjQwMTI0NSAxLjczOTQ3NyAtMy40MDEyNDVDMS45MzA3NiAtMy40MDEyNDUgMi4wODAxOTkgLTMuNTgwNTczIDIuMDgwMTk5IC0zLjczMDAxMlpNMS43MjE1NDQgLTEuNjQzODM2QzEuNzQ1NDU1IC0xLjcwMzYxMSAxLjc5OTI1MyAtMS44NDcwNzMgMS44MjMxNjMgLTEuOTAwODcyQzEuODQxMDk2IC0xLjk1NDY3IDEuODY1MDA2IC0yLjAxNDQ0NiAxLjg2NTAwNiAtMi4xMTYwNjVDMS44NjUwMDYgLTIuNDUwODA5IDEuNTY2MTI3IC0yLjYzNjExNSAxLjI2NzI0OCAtMi42MzYxMTVDMC42NTc1MzQgLTIuNjM2MTE1IDAuMzY0NjMzIC0xLjg0NzA3MyAwLjM2NDYzMyAtMS43MTU1NjdDMC4zNjQ2MzMgLTEuNjg1Njc5IDAuMzg4NTQzIC0xLjYzMTg4IDAuNDcyMjI5IC0xLjYzMTg4UzAuNTczODQ4IC0xLjY2Nzc0NiAwLjU5MTc4MSAtMS43MjE1NDRDMC43NTkxNTMgLTIuMzAxMzcgMS4wNzU5NjUgLTIuNDM4ODU0IDEuMjQzMzM3IC0yLjQzODg1NEMxLjM2Mjg4OSAtMi40Mzg4NTQgMS40MDQ3MzIgLTIuMzYxMTQ2IDEuNDA0NzMyIC0yLjIyMzY2MUMxLjQwNDczMiAtMi4xMDQxMSAxLjM2ODg2NyAtMi4wMTQ0NDYgMS4zNTY5MTIgLTEuOTcyNjAzTDEuMDQ2MDc3IC0xLjIwNzQ3MkMwLjk3NDM0NiAtMS4wMzQxMjIgMC45NzQzNDYgLTEuMDIyMTY3IDAuODk2NjM4IC0wLjgxODkyOUMwLjgxODkyOSAtMC42Mzk2MDEgMC43ODkwNDEgLTAuNTYxODkzIDAuNzg5MDQxIC0wLjQ2MDI3NEMwLjc4OTA0MSAtMC4xNTU0MTcgMS4wNjQwMSAwLjA1OTc3NiAxLjM5Mjc3NyAwLjA1OTc3NkMxLjk5NjUxMyAwLjA1OTc3NiAyLjI5NTM5MiAtMC43MjkyNjUgMi4yOTUzOTIgLTAuODYwNzcyQzIuMjk1MzkyIC0wLjg3MjcyNyAyLjI4OTQxNSAtMC45NDQ0NTggMi4xODE4MTggLTAuOTQ0NDU4QzIuMDk4MTMyIC0wLjk0NDQ1OCAyLjA5MjE1NCAtMC45MTQ1NyAyLjA1NjI4OSAtMC44MDA5OTZDMS45NjA2NDggLTAuNDk2MTM5IDEuNzE1NTY3IC0wLjEzNzQ4NCAxLjQxMDcxIC0wLjEzNzQ4NEMxLjMwMzExMyAtMC4xMzc0ODQgMS4yNDkzMTUgLTAuMjA5MjE1IDEuMjQ5MzE1IC0wLjM1MjY3N0MxLjI0OTMxNSAtMC40NzIyMjkgMS4yODUxODEgLTAuNTYxODkzIDEuMzYyODg5IC0wLjc0NzE5OEwxLjcyMTU0NCAtMS42NDM4MzZaJyBpZD0nZzQtMTA1Jy8+CjxwYXRoIGQ9J00zLjQ3NDk2OSAtMS44MDkyMTVINS44MTgxODJDNS45Mjk3NjMgLTEuODA5MjE1IDYuMTA1MTA2IC0xLjgwOTIxNSA2LjEwNTEwNiAtMS45OTI1MjhTNS45Mjk3NjMgLTIuMTc1ODQxIDUuODE4MTgyIC0yLjE3NTg0MUgzLjQ3NDk2OVYtNC41MjcwMjRDMy40NzQ5NjkgLTQuNjM4NjA1IDMuNDc0OTY5IC00LjgxMzk0OCAzLjI5MTY1NiAtNC44MTM5NDhTMy4xMDgzNDQgLTQuNjM4NjA1IDMuMTA4MzQ0IC00LjUyNzAyNFYtMi4xNzU4NDFIMC43NTcxNjFDMC42NDU1NzkgLTIuMTc1ODQxIDAuNDcwMjM3IC0yLjE3NTg0MSAwLjQ3MDIzNyAtMS45OTI1MjhTMC42NDU1NzkgLTEuODA5MjE1IDAuNzU3MTYxIC0xLjgwOTIxNUgzLjEwODM0NFYwLjU0MTk2OEMzLjEwODM0NCAwLjY1MzU0OSAzLjEwODM0NCAwLjgyODg5MiAzLjI5MTY1NiAwLjgyODg5MlMzLjQ3NDk2OSAwLjY1MzU0OSAzLjQ3NDk2OSAwLjU0MTk2OFYtMS44MDkyMTVaJyBpZD0nZzgtNDMnLz4KPHBhdGggZD0nTTIuNTAyNjE1IC01LjA3Njk2MUMyLjUwMjYxNSAtNS4yOTIxNTQgMi40ODY2NzUgLTUuMzAwMTI1IDIuMjcxNDgyIC01LjMwMDEyNUMxLjk0NDcwNyAtNC45ODEzMiAxLjUyMjI5MSAtNC43OTAwMzcgMC43NjUxMzEgLTQuNzkwMDM3Vi00LjUyNzAyNEMwLjk4MDMyNCAtNC41MjcwMjQgMS40MTA3MSAtNC41MjcwMjQgMS44NzI5NzYgLTQuNzQyMjE3Vi0wLjY1MzU0OUMxLjg3Mjk3NiAtMC4zNTg2NTUgMS44NDkwNjYgLTAuMjYzMDE0IDEuMDkxOTA1IC0wLjI2MzAxNEgwLjgxMjk1MVYwQzEuMTM5NzI2IC0wLjAyMzkxIDEuODI1MTU2IC0wLjAyMzkxIDIuMTgzODExIC0wLjAyMzkxUzMuMjM1ODY2IC0wLjAyMzkxIDMuNTYyNjQgMFYtMC4yNjMwMTRIMy4yODM2ODZDMi41MjY1MjYgLTAuMjYzMDE0IDIuNTAyNjE1IC0wLjM1ODY1NSAyLjUwMjYxNSAtMC42NTM1NDlWLTUuMDc2OTYxWicgaWQ9J2c4LTQ5Jy8+CjxwYXRoIGQ9J00xLjQ5MDQxMSAtMC4xMTk1NTJDMS40OTA0MTEgMC4zOTg1MDYgMS4zNzg4MjkgMC44NTI4MDIgMC44ODQ2ODIgMS4zNDY5NDlDMC44NTI4MDIgMS4zNzA4NTkgMC44MzY4NjIgMS4zODY4IDAuODM2ODYyIDEuNDI2NjVDMC44MzY4NjIgMS40OTA0MTEgMC45MDA2MjMgMS41MzgyMzIgMC45NTY0MTMgMS41MzgyMzJDMS4wNTIwNTUgMS41MzgyMzIgMS43MTM1NzQgMC45MDg1OTMgMS43MTM1NzQgLTAuMDIzOTFDMS43MTM1NzQgLTAuNTMzOTk4IDEuNTIyMjkxIC0wLjg4NDY4MiAxLjE3MTYwNiAtMC44ODQ2ODJDMC44OTI2NTMgLTAuODg0NjgyIDAuNzMzMjUgLTAuNjYxNTE5IDAuNzMzMjUgLTAuNDQ2MzI2QzAuNzMzMjUgLTAuMjIzMTYzIDAuODg0NjgyIDAgMS4xNzk1NzcgMEMxLjM3MDg1OSAwIDEuNDkwNDExIC0wLjExMTU4MiAxLjQ5MDQxMSAtMC4xMTk1NTJaJyBpZD0nZzUtNTknLz4KPHBhdGggZD0nTTMuMDkyNDAzIC00LjgyMTkxOEMzLjE2NDEzNCAtNS4wOTI5MDIgMy4xODAwNzUgLTUuMTgwNTczIDMuOTEzMzI1IC01LjE4MDU3M0M0LjEzNjQ4OCAtNS4xODA1NzMgNC4yMTYxODkgLTUuMTgwNTczIDQuMjE2MTg5IC01LjMzMjAwNUM0LjIxNjE4OSAtNS4zNDc5NDUgNC4yMDAyNDkgLTUuNDQzNTg3IDQuMDgwNjk3IC01LjQ0MzU4N0MzLjkxMzMyNSAtNS40NDM1ODcgMy42NzQyMjIgLTUuNDI3NjQ2IDMuNTA2ODQ5IC01LjQxOTY3NkgyLjkzMzAwMUMyLjEwNDExIC01LjQxOTY3NiAxLjkxMjgyNyAtNS40NDM1ODcgMS44NTcwMzYgLTUuNDQzNTg3QzEuODI1MTU2IC01LjQ0MzU4NyAxLjY5NzYzNCAtNS40NDM1ODcgMS42OTc2MzQgLTUuMjkyMTU0QzEuNjk3NjM0IC01LjE4MDU3MyAxLjgwMTI0NSAtNS4xODA1NzMgMS45Mjg3NjcgLTUuMTgwNTczQzIuMTkxNzgxIC01LjE4MDU3MyAyLjQyMjkxNCAtNS4xODA1NzMgMi40MjI5MTQgLTUuMDUzMDUxQzIuNDIyOTE0IC01LjAyMTE3MSAyLjQxNDk0NCAtNS4wMTMyIDIuMzkxMDM0IC00LjkwOTU4OUwxLjMyMzAzOSAtMC42Mjk2MzlDMS4yNTEzMDggLTAuMzI2Nzc1IDEuMjM1MzY3IC0wLjI2MzAxNCAwLjY0NTU3OSAtMC4yNjMwMTRDMC40OTQxNDcgLTAuMjYzMDE0IDAuMzk4NTA2IC0wLjI2MzAxNCAwLjM5ODUwNiAtMC4xMTE1ODJDMC4zOTg1MDYgMCAwLjUwMjExNyAwIDAuNjM3NjA5IDBINC40ODcxNzNDNC42ODY0MjYgMCA0LjY5NDM5NiAtMC4wMDc5NyA0Ljc1ODE1NyAtMC4xNTk0MDJDNC44Mzc4NTggLTAuMzgyNTY1IDUuNDE5Njc2IC0xLjg4MDk0NiA1LjQxOTY3NiAtMS45NjA2NDhDNS40MTk2NzYgLTIuMDMyMzc5IDUuMzU1OTE1IC0yLjA3MjIyOSA1LjMwMDEyNSAtMi4wNzIyMjlDNS4yMTI0NTMgLTIuMDcyMjI5IDUuMTk2NTEzIC0yLjAxNjQzOCA1LjE0MDcyMiAtMS44OTY4ODdDNC44NTM3OTggLTEuMTU1NjY2IDQuNTExMDgzIC0wLjI2MzAxNCAzLjA4NDQzMyAtMC4yNjMwMTRIMi4wNzIyMjlDMi4wMDA0OTggLTAuMjc4OTU0IDEuOTc2NTg4IC0wLjI3ODk1NCAxLjk3NjU4OCAtMC4zMzQ3NDVDMS45NzY1ODggLTAuMzk4NTA2IDEuOTkyNTI4IC0wLjQ2MjI2NyAyLjAwODQ2OCAtMC41MTAwODdMMy4wOTI0MDMgLTQuODIxOTE4WicgaWQ9J2c1LTc2Jy8+CjxwYXRoIGQ9J00yLjM3NTA5MyAtNC45NzMzNUMyLjM3NTA5MyAtNS4xNDg2OTIgMi4yNDc1NzIgLTUuMjc2MjE0IDIuMDY0MjU5IC01LjI3NjIxNEMxLjg1NzAzNiAtNS4yNzYyMTQgMS42MjU5MDMgLTUuMDg0OTMyIDEuNjI1OTAzIC00Ljg0NTgyOEMxLjYyNTkwMyAtNC42NzA0ODYgMS43NTM0MjUgLTQuNTQyOTY0IDEuOTM2NzM3IC00LjU0Mjk2NEMyLjE0Mzk2IC00LjU0Mjk2NCAyLjM3NTA5MyAtNC43MzQyNDcgMi4zNzUwOTMgLTQuOTczMzVaTTEuMjExNDU3IC0yLjA0ODMxOUwwLjc4MTA3MSAtMC45NDg0NDNDMC43NDEyMiAtMC44Mjg4OTIgMC43MDEzNyAtMC43MzMyNSAwLjcwMTM3IC0wLjU5Nzc1OEMwLjcwMTM3IC0wLjIwNzIyMyAxLjAwNDIzNCAwLjA3OTcwMSAxLjQyNjY1IDAuMDc5NzAxQzIuMTk5NzUxIDAuMDc5NzAxIDIuNTI2NTI2IC0xLjAzNjExNSAyLjUyNjUyNiAtMS4xMzk3MjZDMi41MjY1MjYgLTEuMjE5NDI3IDIuNDYyNzY1IC0xLjI0MzMzNyAyLjQwNjk3NCAtMS4yNDMzMzdDMi4zMTEzMzMgLTEuMjQzMzM3IDIuMjk1MzkyIC0xLjE4NzU0NyAyLjI3MTQ4MiAtMS4xMDc4NDZDMi4wODgxNjkgLTAuNDcwMjM3IDEuNzYxMzk1IC0wLjE0MzQ2MiAxLjQ0MjU5IC0wLjE0MzQ2MkMxLjM0Njk0OSAtMC4xNDM0NjIgMS4yNTEzMDggLTAuMTgzMzEzIDEuMjUxMzA4IC0wLjM5ODUwNkMxLjI1MTMwOCAtMC41ODk3ODggMS4zMDcwOTggLTAuNzMzMjUgMS40MTA3MSAtMC45ODAzMjRDMS40OTA0MTEgLTEuMTk1NTE3IDEuNTcwMTEyIC0xLjQxMDcxIDEuNjU3NzgzIC0xLjYyNTkwM0wxLjkwNDg1NyAtMi4yNzE0ODJDMS45NzY1ODggLTIuNDU0Nzk1IDIuMDcyMjI5IC0yLjcwMTg2OCAyLjA3MjIyOSAtMi44MzczNkMyLjA3MjIyOSAtMy4yMzU4NjYgMS43NTM0MjUgLTMuNTE0ODE5IDEuMzQ2OTQ5IC0zLjUxNDgxOUMwLjU3Mzg0OCAtMy41MTQ4MTkgMC4yMzkxMDMgLTIuMzk5MDA0IDAuMjM5MTAzIC0yLjI5NTM5MkMwLjIzOTEwMyAtMi4yMjM2NjEgMC4yOTQ4OTQgLTIuMTkxNzgxIDAuMzU4NjU1IC0yLjE5MTc4MUMwLjQ2MjI2NyAtMi4xOTE3ODEgMC40NzAyMzcgLTIuMjM5NjAxIDAuNDk0MTQ3IC0yLjMxOTMwM0MwLjcxNzMxIC0zLjA3NjQ2MyAxLjA4MzkzNSAtMy4yOTE2NTYgMS4zMjMwMzkgLTMuMjkxNjU2QzEuNDM0NjIgLTMuMjkxNjU2IDEuNTE0MzIxIC0zLjI1MTgwNiAxLjUxNDMyMSAtMy4wMjg2NDNDMS41MTQzMjEgLTIuOTQ4OTQxIDEuNTA2MzUxIC0yLjgzNzM2IDEuNDI2NjUgLTIuNTk4MjU3TDEuMjExNDU3IC0yLjA0ODMxOVonIGlkPSdnNS0xMDUnLz4KPHBhdGggZD0nTTEuNTk0MDIyIC0xLjMwNzA5OEMxLjYxNzkzMyAtMS40MjY2NSAxLjY5NzYzNCAtMS43Mjk1MTQgMS43MjE1NDQgLTEuODQ5MDY2QzEuODMzMTI2IC0yLjI3OTQ1MiAxLjgzMzEyNiAtMi4yODc0MjIgMi4wMTY0MzggLTIuNTUwNDM2QzIuMjc5NDUyIC0yLjk0MDk3MSAyLjY1NDA0NyAtMy4yOTE2NTYgMy4xODgwNDUgLTMuMjkxNjU2QzMuNDc0OTY5IC0zLjI5MTY1NiAzLjY0MjM0MSAtMy4xMjQyODQgMy42NDIzNDEgLTIuNzQ5Njg5QzMuNjQyMzQxIC0yLjMxMTMzMyAzLjMwNzU5NyAtMS40MDI3NCAzLjE1NjE2NCAtMS4wMTIyMDRDMy4wNTI1NTMgLTAuNzQ5MTkxIDMuMDUyNTUzIC0wLjcwMTM3IDMuMDUyNTUzIC0wLjU5Nzc1OEMzLjA1MjU1MyAtMC4xNDM0NjIgMy40MjcxNDggMC4wNzk3MDEgMy43Njk4NjMgMC4wNzk3MDFDNC41NTA5MzQgMC4wNzk3MDEgNC44Nzc3MDkgLTEuMDM2MTE1IDQuODc3NzA5IC0xLjEzOTcyNkM0Ljg3NzcwOSAtMS4yMTk0MjcgNC44MTM5NDggLTEuMjQzMzM3IDQuNzU4MTU3IC0xLjI0MzMzN0M0LjY2MjUxNiAtMS4yNDMzMzcgNC42NDY1NzUgLTEuMTg3NTQ3IDQuNjIyNjY1IC0xLjEwNzg0NkM0LjQzMTM4MiAtMC40NTQyOTYgNC4wOTY2MzggLTAuMTQzNDYyIDMuNzkzNzczIC0wLjE0MzQ2MkMzLjY2NjI1MiAtMC4xNDM0NjIgMy42MDI0OTEgLTAuMjIzMTYzIDMuNjAyNDkxIC0wLjQwNjQ3NlMzLjY2NjI1MiAtMC43NjUxMzEgMy43NDU5NTMgLTAuOTY0Mzg0QzMuODY1NTA0IC0xLjI2NzI0OCA0LjIxNjE4OSAtMi4xODM4MTEgNC4yMTYxODkgLTIuNjMwMTM3QzQuMjE2MTg5IC0zLjIyNzg5NSAzLjgwMTc0MyAtMy41MTQ4MTkgMy4yMjc4OTUgLTMuNTE0ODE5QzIuNTgyMzE2IC0zLjUxNDgxOSAyLjE2Nzg3IC0zLjEyNDI4NCAxLjkzNjczNyAtMi44MjE0MkMxLjg4MDk0NiAtMy4yNTk3NzYgMS41MzAyNjIgLTMuNTE0ODE5IDEuMTIzNzg2IC0zLjUxNDgxOUMwLjgzNjg2MiAtMy41MTQ4MTkgMC42Mzc2MDkgLTMuMzMxNTA3IDAuNTEwMDg3IC0zLjA4NDQzM0MwLjMxODgwNCAtMi43MDk4MzggMC4yMzkxMDMgLTIuMzExMzMzIDAuMjM5MTAzIC0yLjI5NTM5MkMwLjIzOTEwMyAtMi4yMjM2NjEgMC4yOTQ4OTQgLTIuMTkxNzgxIDAuMzU4NjU1IC0yLjE5MTc4MUMwLjQ2MjI2NyAtMi4xOTE3ODEgMC40NzAyMzcgLTIuMjIzNjYxIDAuNTI2MDI3IC0yLjQzMDg4NEMwLjYyMTY2OSAtMi44MjE0MiAwLjc2NTEzMSAtMy4yOTE2NTYgMS4wOTk4NzUgLTMuMjkxNjU2QzEuMzA3MDk4IC0zLjI5MTY1NiAxLjM1NDkxOSAtMy4wOTI0MDMgMS4zNTQ5MTkgLTIuOTE3MDYxQzEuMzU0OTE5IC0yLjc3MzU5OSAxLjMxNTA2OCAtMi42MjIxNjcgMS4yNTEzMDggLTIuMzU5MTUzQzEuMjM1MzY3IC0yLjI5NTM5MiAxLjExNTgxNiAtMS44MjUxNTYgMS4wODM5MzUgLTEuNzEzNTc0TDAuNzg5MDQxIC0wLjUxODA1N0MwLjc1NzE2MSAtMC4zOTg1MDYgMC43MDkzNCAtMC4xOTkyNTMgMC43MDkzNCAtMC4xNjczNzJDMC43MDkzNCAwLjAxNTk0IDAuODYwNzcyIDAuMDc5NzAxIDAuOTY0Mzg0IDAuMDc5NzAxQzEuMTA3ODQ2IDAuMDc5NzAxIDEuMjI3Mzk3IC0wLjAxNTk0IDEuMjgzMTg4IC0wLjExMTU4MkMxLjMwNzA5OCAtMC4xNTk0MDIgMS4zNzA4NTkgLTAuNDMwMzg2IDEuNDEwNzEgLTAuNTk3NzU4TDEuNTk0MDIyIC0xLjMwNzA5OFonIGlkPSdnNS0xMTAnLz4KPHBhdGggZD0nTTAuNDE0NDQ2IDAuOTY0Mzg0QzAuMzUwNjg1IDEuMjE5NDI3IDAuMzM0NzQ1IDEuMjgzMTg4IDAuMDE1OTQgMS4yODMxODhDLTAuMDk1NjQxIDEuMjgzMTg4IC0wLjE5MTI4MyAxLjI4MzE4OCAtMC4xOTEyODMgMS40MzQ2MkMtMC4xOTEyODMgMS41MDYzNTEgLTAuMTE5NTUyIDEuNTQ2MjAyIC0wLjA3OTcwMSAxLjU0NjIwMkMwIDEuNTQ2MjAyIDAuMDMxODggMS41MjIyOTEgMC42MjE2NjkgMS41MjIyOTFDMS4xOTU1MTcgMS41MjIyOTEgMS4zNjI4ODkgMS41NDYyMDIgMS40MTg2OCAxLjU0NjIwMkMxLjQ1MDU2IDEuNTQ2MjAyIDEuNTcwMTEyIDEuNTQ2MjAyIDEuNTcwMTEyIDEuMzk0NzdDMS41NzAxMTIgMS4yODMxODggMS40NTg1MzEgMS4yODMxODggMS4zNjI4ODkgMS4yODMxODhDMC45ODAzMjQgMS4yODMxODggMC45ODAzMjQgMS4yMzUzNjcgMC45ODAzMjQgMS4xNjM2MzZDMC45ODAzMjQgMS4xMDc4NDYgMS4xMjM3ODYgMC41NDE5NjggMS4zNjI4ODkgLTAuMzkwNTM1QzEuNDY2NTAxIC0wLjIwNzIyMyAxLjcxMzU3NCAwLjA3OTcwMSAyLjE0Mzk2IDAuMDc5NzAxQzMuMTI0Mjg0IDAuMDc5NzAxIDQuMTQ0NDU4IC0xLjA1MjA1NSA0LjE0NDQ1OCAtMi4yMDc3MjFDNC4xNDQ0NTggLTIuOTk2NzYyIDMuNjM0MzcxIC0zLjUxNDgxOSAyLjk5Njc2MiAtMy41MTQ4MTlDMi41MTg1NTUgLTMuNTE0ODE5IDIuMTM1OTkgLTMuMTg4MDQ1IDEuOTA0ODU3IC0yLjk0ODk0MUMxLjczNzQ4NCAtMy41MTQ4MTkgMS4yMDM0ODcgLTMuNTE0ODE5IDEuMTIzNzg2IC0zLjUxNDgxOUMwLjgzNjg2MiAtMy41MTQ4MTkgMC42Mzc2MDkgLTMuMzMxNTA3IDAuNTEwMDg3IC0zLjA4NDQzM0MwLjMyNjc3NSAtMi43MjU3NzggMC4yMzkxMDMgLTIuMzE5MzAzIDAuMjM5MTAzIC0yLjI5NTM5MkMwLjIzOTEwMyAtMi4yMjM2NjEgMC4yOTQ4OTQgLTIuMTkxNzgxIDAuMzU4NjU1IC0yLjE5MTc4MUMwLjQ2MjI2NyAtMi4xOTE3ODEgMC40NzAyMzcgLTIuMjIzNjYxIDAuNTI2MDI3IC0yLjQzMDg4NEMwLjYyOTYzOSAtMi44MzczNiAwLjc3MzEwMSAtMy4yOTE2NTYgMS4wOTk4NzUgLTMuMjkxNjU2QzEuMjk5MTI4IC0zLjI5MTY1NiAxLjM1NDkxOSAtMy4xMDgzNDQgMS4zNTQ5MTkgLTIuOTE3MDYxQzEuMzU0OTE5IC0yLjgzNzM2IDEuMzIzMDM5IC0yLjY0NjA3NyAxLjMwNzA5OCAtMi41ODIzMTZMMC40MTQ0NDYgMC45NjQzODRaTTEuODgwOTQ2IC0yLjQ1NDc5NUMxLjkyMDc5NyAtMi41OTAyODYgMS45MjA3OTcgLTIuNjA2MjI3IDIuMDQwMzQ5IC0yLjc0OTY4OUMyLjM0MzIxMyAtMy4xMDgzNDQgMi42ODU5MjggLTMuMjkxNjU2IDIuOTcyODUyIC0zLjI5MTY1NkMzLjM3MTM1NyAtMy4yOTE2NTYgMy41MjI3OSAtMi45MDExMjEgMy41MjI3OSAtMi41NDI0NjZDMy41MjI3OSAtMi4yNDc1NzIgMy4zNDc0NDcgLTEuMzk0NzcgMy4xMDgzNDQgLTAuOTI0NTMzQzIuOTAxMTIxIC0wLjQ5NDE0NyAyLjUxODU1NSAtMC4xNDM0NjIgMi4xNDM5NiAtMC4xNDM0NjJDMS42MDE5OTMgLTAuMTQzNDYyIDEuNDc0NDcxIC0wLjc2NTEzMSAxLjQ3NDQ3MSAtMC44MjA5MjJDMS40NzQ0NzEgLTAuODM2ODYyIDEuNDkwNDExIC0wLjkyNDUzMyAxLjQ5ODM4MSAtMC45NDg0NDNMMS44ODA5NDYgLTIuNDU0Nzk1WicgaWQ9J2c1LTExMicvPgo8cGF0aCBkPSdNMi45NDY5NDkgLTEuMzM4OTc5SDQuODc3NzA5QzQuOTYxMzk1IC0xLjMzODk3OSA1LjExMDgzNCAtMS4zMzg5NzkgNS4xMTA4MzQgLTEuNDk0Mzk2UzQuOTYxMzk1IC0xLjY0OTgxMyA0Ljg3NzcwOSAtMS42NDk4MTNIMi45NDY5NDlWLTMuNTg2NTVDMi45NDY5NDkgLTMuNjcwMjM3IDIuOTQ2OTQ5IC0zLjgxOTY3NiAyLjc5MTUzMiAtMy44MTk2NzZTMi42MzYxMTUgLTMuNjcwMjM3IDIuNjM2MTE1IC0zLjU4NjU1Vi0xLjY0OTgxM0gwLjcwNTM1NUMwLjYyMTY2OSAtMS42NDk4MTMgMC40NzIyMjkgLTEuNjQ5ODEzIDAuNDcyMjI5IC0xLjQ5NDM5NlMwLjYyMTY2OSAtMS4zMzg5NzkgMC43MDUzNTUgLTEuMzM4OTc5SDIuNjM2MTE1VjAuNTk3NzU4QzIuNjM2MTE1IDAuNjgxNDQ1IDIuNjM2MTE1IDAuODMwODg0IDIuNzkxNTMyIDAuODMwODg0UzIuOTQ2OTQ5IDAuNjgxNDQ1IDIuOTQ2OTQ5IDAuNTk3NzU4Vi0xLjMzODk3OVonIGlkPSdnNy00MycvPgo8cGF0aCBkPSdNMi4xNDU5NTMgLTMuNzk1NzY2QzIuMTQ1OTUzIC0zLjk3NTA5MyAyLjEyMjA0MiAtMy45NzUwOTMgMS45NDI3MTUgLTMuOTc1MDkzQzEuNTQ4MTk0IC0zLjU5MjUyOCAwLjkzODQ4MSAtMy41OTI1MjggMC43MjMyODggLTMuNTkyNTI4Vi0zLjM1OTQwMkMwLjg3ODcwNSAtMy4zNTk0MDIgMS4yNzMyMjUgLTMuMzU5NDAyIDEuNjMxODggLTMuNTI2Nzc1Vi0wLjUwODA5NUMxLjYzMTg4IC0wLjMxMDgzNCAxLjYzMTg4IC0wLjIzMzEyNiAxLjAxNjE4OSAtMC4yMzMxMjZIMC43NTkxNTNWMEMxLjA4NzkyIC0wLjAyMzkxIDEuNTU0MTcyIC0wLjAyMzkxIDEuODg4OTE3IC0wLjAyMzkxUzIuNjg5OTEzIC0wLjAyMzkxIDMuMDE4NjggMFYtMC4yMzMxMjZIMi43NjE2NDRDMi4xNDU5NTMgLTAuMjMzMTI2IDIuMTQ1OTUzIC0wLjMxMDgzNCAyLjE0NTk1MyAtMC41MDgwOTVWLTMuNzk1NzY2WicgaWQ9J2c3LTQ5Jy8+CjxwYXRoIGQ9J000Ljc1ODE1NyAtMS4zMzg5NzlDNC44NTM3OTggLTEuMzM4OTc5IDUuMDAzMjM4IC0xLjMzODk3OSA1LjAwMzIzOCAtMS40OTQzOTZTNC44NTM3OTggLTEuNjQ5ODEzIDQuNzU4MTU3IC0xLjY0OTgxM0gwLjk5MjI3OUMwLjg5NjYzOCAtMS42NDk4MTMgMC43NDcxOTggLTEuNjQ5ODEzIDAuNzQ3MTk4IC0xLjQ5NDM5NlMwLjg5NjYzOCAtMS4zMzg5NzkgMC45OTIyNzkgLTEuMzM4OTc5SDQuNzU4MTU3WicgaWQ9J2cxLTAnLz4KPHBhdGggZD0nTTUuODEwMjEyIC0xLjMzODk3OUM1LjA4NjkyNCAtMC44MjQ5MDcgNC45NDk0NCAtMC4wMzU4NjYgNC45NDk0NCAtMC4wMDU5NzhDNC45NDk0NCAwLjA4OTY2NCA1LjA0NTA4MSAwLjA4OTY2NCA1LjEwNDg1NyAwLjA4OTY2NEM1LjIzNjM2NCAwLjA4OTY2NCA1LjI0MjM0MSAwLjA4MzY4NiA1LjI4NDE4NCAtMC4wODk2NjRDNS4zOTE3ODEgLTAuNTE0MDcyIDUuNjY2NzUgLTAuODEyOTUxIDUuNjk2NjM4IC0wLjg0ODgxN0M2LjA4NTE4MSAtMS4yNDkzMTUgNi40MDE5OTMgLTEuMzM4OTc5IDYuNjc2OTYxIC0xLjQxMDcxQzYuNzA2ODQ5IC0xLjQxNjY4NyA2Ljc0MjcxNSAtMS40NDY1NzUgNi43NDI3MTUgLTEuNDk0Mzk2QzYuNzQyNzE1IC0xLjU1NDE3MiA2LjcwMDg3MiAtMS41NzIxMDUgNi42NTkwMjkgLTEuNTg0MDZDNS43OTgyNTcgLTEuODA1MjMgNS40MDk3MTQgLTIuNDA4OTY2IDUuMjcyMjI5IC0yLjk0MDk3MUM1LjI0MjM0MSAtMy4wNjA1MjMgNS4yMzYzNjQgLTMuMDc4NDU2IDUuMTA0ODU3IC0zLjA3ODQ1NkM1LjAzOTEwMyAtMy4wNzg0NTYgNC45NDk0NCAtMy4wNzg0NTYgNC45NDk0NCAtMi45ODI4MTRDNC45NDk0NCAtMi45NTI5MjcgNS4wODY5MjQgLTIuMTYzODg1IDUuODEwMjEyIC0xLjY0OTgxM0gwLjgwMDk5NkMwLjcwNTM1NSAtMS42NDk4MTMgMC41NTU5MTUgLTEuNjQ5ODEzIDAuNTU1OTE1IC0xLjQ5NDM5NlMwLjcwNTM1NSAtMS4zMzg5NzkgMC44MDA5OTYgLTEuMzM4OTc5SDUuODEwMjEyWicgaWQ9J2cxLTMzJy8+CjxwYXRoIGQ9J00yLjMzMTI1OCAwLjA0NzgyMUMyLjMzMTI1OCAtMC42NDU1NzkgMi4xMDQxMSAtMS4xNTk2NTEgMS42MTM5NDggLTEuMTU5NjUxQzEuMjMxMzgyIC0xLjE1OTY1MSAxLjA0MDEgLTAuODQ4ODE3IDEuMDQwMSAtMC41ODU4MDNTMS4yMTk0MjcgMCAxLjYyNTkwMyAwQzEuNzgxMzIgMCAxLjkxMjgyNyAtMC4wNDc4MjEgMi4wMjA0MjMgLTAuMTU1NDE3QzIuMDQ0MzM0IC0wLjE3OTMyOCAyLjA1NjI4OSAtMC4xNzkzMjggMi4wNjgyNDQgLTAuMTc5MzI4QzIuMDkyMTU0IC0wLjE3OTMyOCAyLjA5MjE1NCAtMC4wMTE5NTUgMi4wOTIxNTQgMC4wNDc4MjFDMi4wOTIxNTQgMC40NDIzNDEgMi4wMjA0MjMgMS4yMTk0MjcgMS4zMjcwMjQgMS45OTY1MTNDMS4xOTU1MTcgMi4xMzk5NzUgMS4xOTU1MTcgMi4xNjM4ODUgMS4xOTU1MTcgMi4xODc3OTZDMS4xOTU1MTcgMi4yNDc1NzIgMS4yNTUyOTMgMi4zMDczNDcgMS4zMTUwNjggMi4zMDczNDdDMS40MTA3MSAyLjMwNzM0NyAyLjMzMTI1OCAxLjQyMjY2NSAyLjMzMTI1OCAwLjA0NzgyMVonIGlkPSdnNi01OScvPgo8cGF0aCBkPSdNMy41OTg1MDYgLTEuNDIyNjY1QzMuNTM4NzMgLTEuMjE5NDI3IDMuNTM4NzMgLTEuMTk1NTE3IDMuMzcxMzU3IC0wLjk2ODM2OUMzLjEwODM0NCAtMC42MzM2MjQgMi41ODIzMTYgLTAuMTE5NTUyIDIuMDIwNDIzIC0wLjExOTU1MkMxLjUzMDI2MiAtMC4xMTk1NTIgMS4yNTUyOTMgLTAuNTYxODkzIDEuMjU1MjkzIC0xLjI2NzI0OEMxLjI1NTI5MyAtMS45MjQ3ODIgMS42MjU5MDMgLTMuMjYzNzYxIDEuODUzMDUxIC0zLjc2NTg3OEMyLjI1OTUyNyAtNC42MDI3NCAyLjgyMTQyIC01LjAzMzEyNiAzLjI4NzY3MSAtNS4wMzMxMjZDNC4wNzY3MTIgLTUuMDMzMTI2IDQuMjMyMTMgLTQuMDUyODAyIDQuMjMyMTMgLTMuOTU3MTYxQzQuMjMyMTMgLTMuOTQ1MjA1IDQuMTk2MjY0IC0zLjc4OTc4OCA0LjE4NDMwOSAtMy43NjU4NzhMMy41OTg1MDYgLTEuNDIyNjY1Wk00LjM2MzYzNiAtNC40ODMxODhDNC4yMzIxMyAtNC43OTQwMjIgMy45MDkzNCAtNS4yNzIyMjkgMy4yODc2NzEgLTUuMjcyMjI5QzEuOTM2NzM3IC01LjI3MjIyOSAwLjQ3ODIwNyAtMy41MjY3NzUgMC40NzgyMDcgLTEuNzU3NDFDMC40NzgyMDcgLTAuNTczODQ4IDEuMTcxNjA2IDAuMTE5NTUyIDEuOTg0NTU4IDAuMTE5NTUyQzIuNjQyMDkyIDAuMTE5NTUyIDMuMjAzOTg1IC0wLjM5NDUyMSAzLjUzODczIC0wLjc4OTA0MUMzLjY1ODI4MSAtMC4wODM2ODYgNC4yMjAxNzQgMC4xMTk1NTIgNC41Nzg4MjkgMC4xMTk1NTJTNS4yMjQ0MDggLTAuMDk1NjQxIDUuNDM5NjAxIC0wLjUyNjAyN0M1LjYzMDg4NCAtMC45MzI1MDMgNS43OTgyNTcgLTEuNjYxNzY4IDUuNzk4MjU3IC0xLjcwOTU4OUM1Ljc5ODI1NyAtMS43NjkzNjUgNS43NTA0MzYgLTEuODE3MTg2IDUuNjc4NzA1IC0xLjgxNzE4NkM1LjU3MTEwOCAtMS44MTcxODYgNS41NTkxNTMgLTEuNzU3NDEgNS41MTEzMzMgLTEuNTc4MDgyQzUuMzMyMDA1IC0wLjg3MjcyNyA1LjEwNDg1NyAtMC4xMTk1NTIgNC42MTQ2OTUgLTAuMTE5NTUyQzQuMjY3OTk1IC0wLjExOTU1MiA0LjI0NDA4NSAtMC40MzAzODYgNC4yNDQwODUgLTAuNjY5NDg5QzQuMjQ0MDg1IC0wLjk0NDQ1OCA0LjI3OTk1IC0xLjA3NTk2NSA0LjM4NzU0NyAtMS41NDIyMTdDNC40NzEyMzMgLTEuODQxMDk2IDQuNTMxMDA5IC0yLjEwNDExIDQuNjI2NjUgLTIuNDUwODA5QzUuMDY4OTkxIC00LjI0NDA4NSA1LjE3NjU4OCAtNC42NzQ0NzEgNS4xNzY1ODggLTQuNzQ2MjAyQzUuMTc2NTg4IC00LjkxMzU3NCA1LjA0NTA4MSAtNS4wNDUwODEgNC44NjU3NTMgLTUuMDQ1MDgxQzQuNDgzMTg4IC01LjA0NTA4MSA0LjM4NzU0NyAtNC42MjY2NSA0LjM2MzYzNiAtNC40ODMxODhaJyBpZD0nZzYtOTcnLz4KPHBhdGggZD0nTTMuMzU5NDAyIC03Ljk5ODAwN0MzLjM3MTM1NyAtOC4wNDU4MjggMy4zOTUyNjggLTguMTE3NTU5IDMuMzk1MjY4IC04LjE3NzMzNUMzLjM5NTI2OCAtOC4yOTY4ODcgMy4yNzU3MTYgLTguMjk2ODg3IDMuMjUxODA2IC04LjI5Njg4N0MzLjIzOTg1MSAtOC4yOTY4ODcgMi44MDk0NjUgLTguMjYxMDIxIDIuNTk0MjcxIC04LjIzNzExMUMyLjM5MTAzNCAtOC4yMjUxNTYgMi4yMTE3MDYgLTguMjAxMjQ1IDEuOTk2NTEzIC04LjE4OTI5QzEuNzA5NTg5IC04LjE2NTM4IDEuNjI1OTAzIC04LjE1MzQyNSAxLjYyNTkwMyAtNy45MzgyMzJDMS42MjU5MDMgLTcuODE4NjggMS43NDU0NTUgLTcuODE4NjggMS44NjUwMDYgLTcuODE4NjhDMi40NzQ3MiAtNy44MTg2OCAyLjQ3NDcyIC03LjcxMTA4MyAyLjQ3NDcyIC03LjU5MTUzMkMyLjQ3NDcyIC03LjU0MzcxMSAyLjQ3NDcyIC03LjUxOTgwMSAyLjQxNDk0NCAtNy4zMDQ2MDhMMC43MDUzNTUgLTAuNDY2MjUyQzAuNjU3NTM0IC0wLjI4NjkyNCAwLjY1NzUzNCAtMC4yNjMwMTQgMC42NTc1MzQgLTAuMTkxMjgzQzAuNjU3NTM0IDAuMDcxNzMxIDAuODYwNzcyIDAuMTE5NTUyIDAuOTgwMzI0IDAuMTE5NTUyQzEuMzE1MDY4IDAuMTE5NTUyIDEuMzg2OCAtMC4xNDM0NjIgMS40ODI0NDEgLTAuNTE0MDcyTDIuMDQ0MzM0IC0yLjc0OTY4OUMyLjkwNTEwNiAtMi42NTQwNDcgMy40MTkxNzggLTIuMjk1MzkyIDMuNDE5MTc4IC0xLjcyMTU0NEMzLjQxOTE3OCAtMS42NDk4MTMgMy40MTkxNzggLTEuNjAxOTkzIDMuMzgzMzEzIC0xLjQyMjY2NUMzLjMzNTQ5MiAtMS4yNDMzMzcgMy4zMzU0OTIgLTEuMDk5ODc1IDMuMzM1NDkyIC0xLjA0MDFDMy4zMzU0OTIgLTAuMzQ2NyAzLjc4OTc4OCAwLjExOTU1MiA0LjM5OTUwMiAwLjExOTU1MkM0Ljk0OTQ0IDAuMTE5NTUyIDUuMjM2MzY0IC0wLjM4MjU2NSA1LjMzMjAwNSAtMC41NDk5MzhDNS41ODMwNjQgLTAuOTkyMjc5IDUuNzM4NDgxIC0xLjY2MTc2OCA1LjczODQ4MSAtMS43MDk1ODlDNS43Mzg0ODEgLTEuNzY5MzY1IDUuNjkwNjYgLTEuODE3MTg2IDUuNjE4OTI5IC0xLjgxNzE4NkM1LjUxMTMzMyAtMS44MTcxODYgNS40OTkzNzcgLTEuNzY5MzY1IDUuNDUxNTU3IC0xLjU3ODA4MkM1LjI4NDE4NCAtMC45NTY0MTMgNS4wMzMxMjYgLTAuMTE5NTUyIDQuNDIzNDEyIC0wLjExOTU1MkM0LjE4NDMwOSAtMC4xMTk1NTIgNC4wMjg4OTIgLTAuMjM5MTAzIDQuMDI4ODkyIC0wLjY5MzRDNC4wMjg4OTIgLTAuOTIwNTQ4IDQuMDc2NzEyIC0xLjE4MzU2MiA0LjEyNDUzMyAtMS4zNjI4ODlDNC4xNzIzNTQgLTEuNTc4MDgyIDQuMTcyMzU0IC0xLjU5MDAzNyA0LjE3MjM1NCAtMS43MzM0OTlDNC4xNzIzNTQgLTIuNDM4ODU0IDMuNTM4NzMgLTIuODMzMzc1IDIuNDM4ODU0IC0yLjk3NjgzN0MyLjg2OTI0IC0zLjIzOTg1MSAzLjI5OTYyNiAtMy43MDYxMDIgMy40NjY5OTkgLTMuODg1NDNDNC4xNDg0NDMgLTQuNjUwNTYgNC42MTQ2OTUgLTUuMDMzMTI2IDUuMTY0NjMzIC01LjAzMzEyNkM1LjQzOTYwMSAtNS4wMzMxMjYgNS41MTEzMzMgLTQuOTYxMzk1IDUuNTk1MDE5IC00Ljg4OTY2NEM1LjE1MjY3NyAtNC44NDE4NDMgNC45ODUzMDUgLTQuNTMxMDA5IDQuOTg1MzA1IC00LjI5MTkwNUM0Ljk4NTMwNSAtNC4wMDQ5ODEgNS4yMTI0NTMgLTMuOTA5MzQgNS4zNzk4MjYgLTMuOTA5MzRDNS43MDI2MTUgLTMuOTA5MzQgNS45ODk1MzkgLTQuMTg0MzA5IDUuOTg5NTM5IC00LjU2Njg3NEM1Ljk4OTUzOSAtNC45MTM1NzQgNS43MTQ1NyAtNS4yNzIyMjkgNS4xNzY1ODggLTUuMjcyMjI5QzQuNTE5MDU0IC01LjI3MjIyOSAzLjk4MTA3MSAtNC44MDU5NzggMy4xMzIyNTQgLTMuODQ5NTY0QzMuMDEyNzAyIC0zLjcwNjEwMiAyLjU3MDM2MSAtMy4yNTE4MDYgMi4xMjgwMiAtMy4wODQ0MzNMMy4zNTk0MDIgLTcuOTk4MDA3WicgaWQ9J2c2LTEwNycvPgo8cGF0aCBkPSdNMC41MTQwNzIgMS41MTgzMDZDMC40MzAzODYgMS44NzY5NjEgMC4zODI1NjUgMS45NzI2MDMgLTAuMTA3NTk3IDEuOTcyNjAzQy0wLjI1MTA1OSAxLjk3MjYwMyAtMC4zNzA2MSAxLjk3MjYwMyAtMC4zNzA2MSAyLjE5OTc1MUMtMC4zNzA2MSAyLjIyMzY2MSAtMC4zNTg2NTUgMi4zMTkzMDMgLTAuMjI3MTQ4IDIuMzE5MzAzQy0wLjA3MTczMSAyLjMxOTMwMyAwLjA5NTY0MSAyLjI5NTM5MiAwLjI1MTA1OSAyLjI5NTM5MkgwLjc2NTEzMUMxLjAxNjE4OSAyLjI5NTM5MiAxLjYyNTkwMyAyLjMxOTMwMyAxLjg3Njk2MSAyLjMxOTMwM0MxLjk0ODY5MiAyLjMxOTMwMyAyLjA5MjE1NCAyLjMxOTMwMyAyLjA5MjE1NCAyLjEwNDExQzIuMDkyMTU0IDEuOTcyNjAzIDIuMDA4NDY4IDEuOTcyNjAzIDEuODA1MjMgMS45NzI2MDNDMS4yNTUyOTMgMS45NzI2MDMgMS4yMTk0MjcgMS44ODg5MTcgMS4yMTk0MjcgMS43OTMyNzVDMS4yMTk0MjcgMS42NDk4MTMgMS43NTc0MSAtMC40MDY0NzYgMS44MjkxNDEgLTAuNjgxNDQ1QzEuOTYwNjQ4IC0wLjM0NjcgMi4yODM0MzcgMC4xMTk1NTIgMi45MDUxMDYgMC4xMTk1NTJDNC4yNTYwNCAwLjExOTU1MiA1LjcxNDU3IC0xLjYzNzg1OCA1LjcxNDU3IC0zLjM5NTI2OEM1LjcxNDU3IC00LjQ5NTE0MyA1LjA5MjkwMiAtNS4yNzIyMjkgNC4xOTYyNjQgLTUuMjcyMjI5QzMuNDMxMTMzIC01LjI3MjIyOSAyLjc4NTU1NCAtNC41MzEwMDkgMi42NTQwNDcgLTQuMzYzNjM2QzIuNTU4NDA2IC00Ljk2MTM5NSAyLjA5MjE1NCAtNS4yNzIyMjkgMS42MTM5NDggLTUuMjcyMjI5QzEuMjY3MjQ4IC01LjI3MjIyOSAwLjk5MjI3OSAtNS4xMDQ4NTcgMC43NjUxMzEgLTQuNjUwNTZDMC41NDk5MzggLTQuMjIwMTc0IDAuMzgyNTY1IC0zLjQ5MDkwOSAwLjM4MjU2NSAtMy40NDMwODhTMC40MzAzODYgLTMuMzM1NDkyIDAuNTE0MDcyIC0zLjMzNTQ5MkMwLjYwOTcxNCAtMy4zMzU0OTIgMC42MjE2NjkgLTMuMzQ3NDQ3IDAuNjkzNCAtMy42MjI0MTZDMC44NzI3MjcgLTQuMzI3NzcxIDEuMDk5ODc1IC01LjAzMzEyNiAxLjU3ODA4MiAtNS4wMzMxMjZDMS44NTMwNTEgLTUuMDMzMTI2IDEuOTQ4NjkyIC00Ljg0MTg0MyAxLjk0ODY5MiAtNC40ODMxODhDMS45NDg2OTIgLTQuMTk2MjY0IDEuOTEyODI3IC00LjA3NjcxMiAxLjg2NTAwNiAtMy44NjE1MTlMMC41MTQwNzIgMS41MTgzMDZaTTIuNTgyMzE2IC0zLjczMDAxMkMyLjY2NjAwMiAtNC4wNjQ3NTcgMy4wMDA3NDcgLTQuNDExNDU3IDMuMTkyMDMgLTQuNTc4ODI5QzMuMzIzNTM3IC00LjY5ODM4MSAzLjcxODA1NyAtNS4wMzMxMjYgNC4xNzIzNTQgLTUuMDMzMTI2QzQuNjk4MzgxIC01LjAzMzEyNiA0LjkzNzQ4NCAtNC41MDcwOTggNC45Mzc0ODQgLTMuODg1NDNDNC45Mzc0ODQgLTMuMzExNTgyIDQuNjAyNzQgLTEuOTYwNjQ4IDQuMzAzODYxIC0xLjMzODk3OUM0LjAwNDk4MSAtMC42OTM0IDMuNDU1MDQ0IC0wLjExOTU1MiAyLjkwNTEwNiAtMC4xMTk1NTJDMi4wOTIxNTQgLTAuMTE5NTUyIDEuOTYwNjQ4IC0xLjE0NzY5NiAxLjk2MDY0OCAtMS4xOTU1MTdDMS45NjA2NDggLTEuMjMxMzgyIDEuOTg0NTU4IC0xLjMyNzAyNCAxLjk5NjUxMyAtMS4zODY4TDIuNTgyMzE2IC0zLjczMDAxMlonIGlkPSdnNi0xMTInLz4KPHBhdGggZD0nTTcuODc4NDU2IC0yLjc0OTY4OUM4LjA4MTY5NCAtMi43NDk2ODkgOC4yOTY4ODcgLTIuNzQ5Njg5IDguMjk2ODg3IC0yLjk4ODc5MlM4LjA4MTY5NCAtMy4yMjc4OTUgNy44Nzg0NTYgLTMuMjI3ODk1SDEuNDEwNzFDMS4yMDc0NzIgLTMuMjI3ODk1IDAuOTkyMjc5IC0zLjIyNzg5NSAwLjk5MjI3OSAtMi45ODg3OTJTMS4yMDc0NzIgLTIuNzQ5Njg5IDEuNDEwNzEgLTIuNzQ5Njg5SDcuODc4NDU2WicgaWQ9J2czLTAnLz4KPHBhdGggZD0nTTEwLjg1NTI5MyAtMi43NDk2ODlDMTEuMDcwNDg2IC0yLjc0OTY4OSAxMS4yODU2NzkgLTIuNzQ5Njg5IDExLjI4NTY3OSAtMi45ODg3OTJTMTEuMDcwNDg2IC0zLjIyNzg5NSAxMC44NTUyOTMgLTMuMjI3ODk1SDEuOTcyNjAzQzIuNjMwMTM3IC0zLjczMDAxMiAyLjk1MjkyNyAtNC4yMjAxNzQgMy4wNDg1NjggLTQuMzc1NTkyQzMuNTg2NTUgLTUuMjAwNDk4IDMuNjgyMTkyIC01Ljk1MzY3NCAzLjY4MjE5MiAtNS45NjU2MjlDMy42ODIxOTIgLTYuMTA5MDkxIDMuNTM4NzMgLTYuMTA5MDkxIDMuNDQzMDg4IC02LjEwOTA5MUMzLjIzOTg1MSAtNi4xMDkwOTEgMy4yMjc4OTUgLTYuMDg1MTgxIDMuMTgwMDc1IC01Ljg2OTk4OEMyLjkwNTEwNiAtNC42OTgzODEgMi4xOTk3NTEgLTMuNzA2MTAyIDAuODQ4ODE3IC0zLjE0NDIwOUMwLjcxNzMxIC0zLjA5NjM4OSAwLjY2OTQ4OSAtMy4wNzI0NzggMC42Njk0ODkgLTIuOTg4NzkyUzAuNzI5MjY1IC0yLjg4MTE5NiAwLjg0ODgxNyAtMi44MzMzNzVDMi4wOTIxNTQgLTIuMzE5MzAzIDIuODkzMTUxIC0xLjM4NjggMy4xOTIwMyAtMC4wNDc4MjFDMy4yMjc4OTUgMC4wOTU2NDEgMy4yMzk4NTEgMC4xMzE1MDcgMy40NDMwODggMC4xMzE1MDdDMy41Mzg3MyAwLjEzMTUwNyAzLjY4MjE5MiAwLjEzMTUwNyAzLjY4MjE5MiAtMC4wMTE5NTVDMy42ODIxOTIgLTAuMDM1ODY2IDMuNTc0NTk1IC0wLjc4OTA0MSAzLjA3MjQ3OCAtMS41OTAwMzdDMi44MzMzNzUgLTEuOTQ4NjkyIDIuNDg2Njc1IC0yLjM2NzEyMyAxLjk3MjYwMyAtMi43NDk2ODlIMTAuODU1MjkzWicgaWQ9J2czLTMyJy8+CjxwYXRoIGQ9J00yLjA1NjI4OSAtOC41NTk5QzIuMDU2Mjg5IC04Ljc1MTE4MyAyLjA1NjI4OSAtOC45NjYzNzYgMS44MTcxODYgLTguOTY2Mzc2UzEuNTc4MDgyIC04LjcwMzM2MiAxLjU3ODA4MiAtOC41MjQwMzVWMi41NDY0NTFDMS41NzgwODIgMi43Mzc3MzMgMS41NzgwODIgMi45ODg3OTIgMS44MTcxODYgMi45ODg3OTJTMi4wNTYyODkgMi43NzM1OTkgMi4wNTYyODkgMi41ODIzMTZWLTguNTU5OVpNNC4zODc1NDcgLTguNTI0MDM1QzQuMzg3NTQ3IC04LjcxNTMxOCA0LjM4NzU0NyAtOC45NjYzNzYgNC4xNDg0NDMgLTguOTY2Mzc2UzMuOTA5MzQgLTguNzUxMTgzIDMuOTA5MzQgLTguNTU5OVYyLjU4MjMxNkMzLjkwOTM0IDIuNzczNTk5IDMuOTA5MzQgMi45ODg3OTIgNC4xNDg0NDMgMi45ODg3OTJTNC4zODc1NDcgMi43MjU3NzggNC4zODc1NDcgMi41NDY0NTFWLTguNTI0MDM1WicgaWQ9J2czLTEwNycvPgo8cGF0aCBkPSdNNC43NzAxMTIgLTIuNzYxNjQ0SDguMDY5NzM4QzguMjM3MTExIC0yLjc2MTY0NCA4LjQ1MjMwNCAtMi43NjE2NDQgOC40NTIzMDQgLTIuOTc2ODM3QzguNDUyMzA0IC0zLjIwMzk4NSA4LjI0OTA2NiAtMy4yMDM5ODUgOC4wNjk3MzggLTMuMjAzOTg1SDQuNzcwMTEyVi02LjUwMzYxMUM0Ljc3MDExMiAtNi42NzA5ODQgNC43NzAxMTIgLTYuODg2MTc3IDQuNTU0OTE5IC02Ljg4NjE3N0M0LjMyNzc3MSAtNi44ODYxNzcgNC4zMjc3NzEgLTYuNjgyOTM5IDQuMzI3NzcxIC02LjUwMzYxMVYtMy4yMDM5ODVIMS4wMjgxNDRDMC44NjA3NzIgLTMuMjAzOTg1IDAuNjQ1NTc5IC0zLjIwMzk4NSAwLjY0NTU3OSAtMi45ODg3OTJDMC42NDU1NzkgLTIuNzYxNjQ0IDAuODQ4ODE3IC0yLjc2MTY0NCAxLjAyODE0NCAtMi43NjE2NDRINC4zMjc3NzFWMC41Mzc5ODNDNC4zMjc3NzEgMC43MDUzNTUgNC4zMjc3NzEgMC45MjA1NDggNC41NDI5NjQgMC45MjA1NDhDNC43NzAxMTIgMC45MjA1NDggNC43NzAxMTIgMC43MTczMSA0Ljc3MDExMiAwLjUzNzk4M1YtMi43NjE2NDRaJyBpZD0nZzktNDMnLz4KPHBhdGggZD0nTTEuNzMzNDk5IDYuOTgxODE4QzEuNzMzNDk5IDcuMTczMTAxIDEuNzMzNDk5IDcuNDI0MTU5IDEuOTg0NTU4IDcuNDI0MTU5QzIuMjQ3NTcyIDcuNDI0MTU5IDIuMjQ3NTcyIDcuMTg1MDU2IDIuMjQ3NTcyIDYuOTgxODE4VjAuMTkxMjgzQzIuMjQ3NTcyIDAgMi4yNDc1NzIgLTAuMjUxMDU5IDEuOTk2NTEzIC0wLjI1MTA1OUMxLjczMzQ5OSAtMC4yNTEwNTkgMS43MzM0OTkgLTAuMDExOTU1IDEuNzMzNDk5IDAuMTkxMjgzVjYuOTgxODE4Wk00LjM4NzU0NyA2Ljk4MTgxOEM0LjM4NzU0NyA3LjE3MzEwMSA0LjM4NzU0NyA3LjQyNDE1OSA0LjYzODYwNSA3LjQyNDE1OUM0LjkwMTYxOSA3LjQyNDE1OSA0LjkwMTYxOSA3LjE4NTA1NiA0LjkwMTYxOSA2Ljk4MTgxOFYwLjE5MTI4M0M0LjkwMTYxOSAwIDQuOTAxNjE5IC0wLjI1MTA1OSA0LjY1MDU2IC0wLjI1MTA1OUM0LjM4NzU0NyAtMC4yNTEwNTkgNC4zODc1NDcgLTAuMDExOTU1IDQuMzg3NTQ3IDAuMTkxMjgzVjYuOTgxODE4WicgaWQ9J2cwLTEzJy8+CjxwYXRoIGQ9J00yLjcwMTg2OCAyMS4wMjkxNDFINS40MTU2OTFWMjAuNDY3MjQ4SDMuMjYzNzYxVjAuMDgzNjg2SDUuNDE1NjkxVi0wLjQ3ODIwN0gyLjcwMTg2OFYyMS4wMjkxNDFaJyBpZD0nZzAtMTA0Jy8+CjxwYXRoIGQ9J00yLjM2NzEyMyAyMC40NjcyNDhIMC4yMTUxOTNWMjEuMDI5MTQxSDIuOTI5MDE2Vi0wLjQ3ODIwN0gwLjIxNTE5M1YwLjA4MzY4NkgyLjM2NzEyM1YyMC40NjcyNDhaJyBpZD0nZzAtMTA1Jy8+CjxwYXRoIGQ9J001LjU3MTEwOCAtMS44MDkyMTVDNS42OTg2MyAtMS44MDkyMTUgNS44NzM5NzMgLTEuODA5MjE1IDUuODczOTczIC0xLjk5MjUyOFM1LjY5ODYzIC0yLjE3NTg0MSA1LjU3MTEwOCAtMi4xNzU4NDFIMS4wMDQyMzRDMC44NzY3MTIgLTIuMTc1ODQxIDAuNzAxMzcgLTIuMTc1ODQxIDAuNzAxMzcgLTEuOTkyNTI4UzAuODc2NzEyIC0xLjgwOTIxNSAxLjAwNDIzNCAtMS44MDkyMTVINS41NzExMDhaJyBpZD0nZzItMCcvPgo8cGF0aCBkPSdNNi45NTc5MDggLTEuODA5MjE1QzYuNjg2OTI0IC0xLjYwOTk2MyA2LjQzOTg1MSAtMS4zNTQ5MTkgNi4yNDg1NjggLTEuMDY3OTk1QzUuOTA1ODUzIC0wLjU0OTkzOCA1LjgxODE4MiAtMC4wMzk4NTEgNS44MTgxODIgLTAuMDA3OTdDNS44MTgxODIgMC4xMTE1ODIgNS45Mjk3NjMgMC4xMTE1ODIgNi4wMDE0OTQgMC4xMTE1ODJDNi4wODkxNjYgMC4xMTE1ODIgNi4xNjA4OTcgMC4xMTE1ODIgNi4xODQ4MDcgMC4wMDc5N0M2LjM5MjAzIC0wLjg3NjcxMiA2LjkwMjExNyAtMS41NDYyMDIgNy44NjY1MDEgLTEuODcyOTc2QzcuOTMwMjYyIC0xLjg4ODkxNyA3Ljk5NDAyMiAtMS45MTI4MjcgNy45OTQwMjIgLTEuOTkyNTI4UzcuOTIyMjkxIC0yLjA5NjEzOSA3Ljg5MDQxMSAtMi4xMDQxMUM2LjgzMDM4NiAtMi40NjI3NjUgNi4zNjgxMiAtMy4yMTE5NTUgNi4yMDA3NDcgLTMuOTEzMzI1QzYuMTYwODk3IC00LjA3MjcyNyA2LjE2MDg5NyAtNC4wOTY2MzggNi4wMDE0OTQgLTQuMDk2NjM4QzUuOTI5NzYzIC00LjA5NjYzOCA1LjgxODE4MiAtNC4wOTY2MzggNS44MTgxODIgLTMuOTc3MDg2QzUuODE4MTgyIC0zLjk2MTE0NiA1Ljg5Nzg4MyAtMy40MzUxMTggNi4yNDg1NjggLTIuOTA5MDkxQzYuNDc5NzAxIC0yLjU3NDM0NiA2Ljc1ODY1NSAtMi4zMjcyNzMgNi45NTc5MDggLTIuMTc1ODQxSDAuNzczMTAxQzAuNjQ1NTc5IC0yLjE3NTg0MSAwLjQ3MDIzNyAtMi4xNzU4NDEgMC40NzAyMzcgLTEuOTkyNTI4UzAuNjQ1NTc5IC0xLjgwOTIxNSAwLjc3MzEwMSAtMS44MDkyMTVINi45NTc5MDhaJyBpZD0nZzItMzMnLz4KPC9kZWZzPgo8ZyBpZD0ncGFnZTEnPgo8dXNlIHg9JzU2LjQxMzI2NycgeGxpbms6aHJlZj0nI2c2LTk3JyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PSc2Mi41NTgyMTEnIHhsaW5rOmhyZWY9JyNnNS0xMDUnIHk9JzY5LjY5NTU4MScvPgo8dXNlIHg9JzY5LjI2MDMxMicgeGxpbms6aHJlZj0nI2czLTMyJyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PSc3OS4yMjMwMTcnIHhsaW5rOmhyZWY9JyNnMy0wJyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PSc5MS44NDIzMzYnIHhsaW5rOmhyZWY9JyNnNi05NycgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nOTcuOTg3MjgnIHhsaW5rOmhyZWY9JyNnNS0xMDUnIHk9JzY5LjY5NTU4MScvPgo8dXNlIHg9JzEwNC4wMjUyMTUnIHhsaW5rOmhyZWY9JyNnOS00MycgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nMTE1Ljc4NjUzJyB4bGluazpocmVmPScjZzYtMTA3JyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxMjQuMjY4NTMyJyB4bGluazpocmVmPScjZzAtMTA0JyB5PSc1NC42MzE5NjgnLz4KPHVzZSB4PScxMjkuOTE0MDQ4JyB4bGluazpocmVmPScjZzAtMTMnIHk9JzU0LjE1Mzc2NScvPgo8dXNlIHg9JzEyOS45MTQwNDgnIHhsaW5rOmhyZWY9JyNnMC0xMycgeT0nNjEuMzI2OTM5Jy8+Cjx1c2UgeD0nMTI5LjkxNDA0OCcgeGxpbms6aHJlZj0nI2cwLTEzJyB5PSc2OC41MDAxMTMnLz4KPHVzZSB4PScxNDcuMDIyOTI1JyB4bGluazpocmVmPScjZzItMCcgeT0nNjAuMzYzOTIyJy8+Cjx1c2UgeD0nMTUyLjE5ODAzNycgeGxpbms6aHJlZj0nI2cyLTMzJyB5PSc2MC4zNjM5MjInLz4KPHVzZSB4PScxMzYuNTU1ODI5JyB4bGluazpocmVmPScjZzYtMTEyJyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxNDIuNDMwOTcyJyB4bGluazpocmVmPScjZzUtMTA1JyB5PSc2OS42OTU1ODEnLz4KPHVzZSB4PScxNDUuMzE0MTExJyB4bGluazpocmVmPScjZzgtNDMnIHk9JzY5LjY5NTU4MScvPgo8dXNlIHg9JzE1MS45MDA2MTgnIHhsaW5rOmhyZWY9JyNnOC00OScgeT0nNjkuNjk1NTgxJy8+Cjx1c2UgeD0nMTU2LjYzMjkzMycgeGxpbms6aHJlZj0nI2c2LTU5JyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxNjEuODc3MDkyJyB4bGluazpocmVmPScjZzYtMTEyJyB5PSc2Ny45MDIzMTgnLz4KPHVzZSB4PScxNjcuNzUyMjM1JyB4bGluazpocmVmPScjZzUtMTA1JyB5PSc2OS42OTU1ODEnLz4KPHVzZSB4PScxNzEuMTMzNDk5JyB4bGluazpocmVmPScjZzAtMTMnIHk9JzU0LjE1Mzc2NScvPgo8dXNlIHg9JzE3MS4xMzM0OTknIHhsaW5rOmhyZWY9JyNnMC0xMycgeT0nNjEuMzI2OTM5Jy8+Cjx1c2UgeD0nMTcxLjEzMzQ5OScgeGxpbms6aHJlZj0nI2cwLTEzJyB5PSc2OC41MDAxMTMnLz4KPHVzZSB4PScxODAuNDMxOTQzJyB4bGluazpocmVmPScjZzMtMCcgeT0nNjcuOTAyMzE4Jy8+Cjx1c2UgeD0nMTk4LjY4MjU0MScgeGxpbms6aHJlZj0nI2c1LTc2JyB5PSc2My4xOTUxOTMnLz4KPHJlY3QgaGVpZ2h0PScwLjQ3ODE4Nycgd2lkdGg9JzE1Ljk1ODg5MicgeD0nMTkzLjU4MjYxNycgeT0nNjQuNjc0NDMzJy8+Cjx1c2UgeD0nMTkzLjU4MjYxNycgeGxpbms6aHJlZj0nI2c1LTExMCcgeT0nNzIuMDI0OTUnLz4KPHVzZSB4PScxOTguNzIwODE5JyB4bGluazpocmVmPScjZzItMCcgeT0nNzIuMDI0OTUnLz4KPHVzZSB4PScyMDUuMzA3MzI2JyB4bGluazpocmVmPScjZzgtNDknIHk9JzcyLjAyNDk1Jy8+Cjx1c2UgeD0nMjEwLjczNzAyMycgeGxpbms6aHJlZj0nI2cwLTEwNScgeT0nNTQuNjMxOTY4Jy8+Cjx1c2UgeD0nMjMyLjg3NTgyNycgeGxpbms6aHJlZj0nI2cxLTAnIHk9JzU3LjEyNTM2NCcvPgo8dXNlIHg9JzIzNy4zNTg5ODQnIHhsaW5rOmhyZWY9JyNnMS0zMycgeT0nNTcuMTI1MzY0Jy8+Cjx1c2UgeD0nMjI1LjU0ODE0MicgeGxpbms6aHJlZj0nI2c1LTExMicgeT0nNjIuMTUwOTY3Jy8+Cjx1c2UgeD0nMjI5LjgxMDkxOScgeGxpbms6aHJlZj0nI2c0LTEwNScgeT0nNjMuMzY2MDQ2Jy8+Cjx1c2UgeD0nMjMyLjQ3NDU0NScgeGxpbms6aHJlZj0nI2c3LTQzJyB5PSc2My4zNjYwNDYnLz4KPHVzZSB4PScyMzguMDY0NjM4JyB4bGluazpocmVmPScjZzctNDknIHk9JzYzLjM2NjA0NicvPgo8dXNlIHg9JzI0Mi4yMTU2OCcgeGxpbms6aHJlZj0nI2c1LTU5JyB5PSc2Mi4xNTA5NjcnLz4KPHVzZSB4PScyNDQuNTY4MDA0JyB4bGluazpocmVmPScjZzUtMTEyJyB5PSc2Mi4xNTA5NjcnLz4KPHVzZSB4PScyNDguODMwNzgyJyB4bGluazpocmVmPScjZzQtMTA1JyB5PSc2My4zNjYwNDYnLz4KPHJlY3QgaGVpZ2h0PScwLjQ3ODE4Nycgd2lkdGg9JzM4LjM5OTU5NicgeD0nMjE5LjU3MDU0MycgeT0nNjQuNjc0NDMzJy8+Cjx1c2UgeD0nMjE5LjU3MDU0MycgeGxpbms6aHJlZj0nI2czLTEwNycgeT0nNzQuOTc5NzgyJy8+Cjx1c2UgeD0nMjMyLjg3NTgyNycgeGxpbms6aHJlZj0nI2cxLTAnIHk9JzY4Ljk1NzkxNScvPgo8dXNlIHg9JzIzNy4zNTg5ODQnIHhsaW5rOmhyZWY9JyNnMS0zMycgeT0nNjguOTU3OTE1Jy8+Cjx1c2UgeD0nMjI1LjU0ODE0MicgeGxpbms6aHJlZj0nI2c1LTExMicgeT0nNzMuOTgzNTE4Jy8+Cjx1c2UgeD0nMjI5LjgxMDkxOScgeGxpbms6aHJlZj0nI2c0LTEwNScgeT0nNzUuMTk4NTk2Jy8+Cjx1c2UgeD0nMjMyLjQ3NDU0NScgeGxpbms6aHJlZj0nI2c3LTQzJyB5PSc3NS4xOTg1OTYnLz4KPHVzZSB4PScyMzguMDY0NjM4JyB4bGluazpocmVmPScjZzctNDknIHk9Jzc1LjE5ODU5NicvPgo8dXNlIHg9JzI0Mi4yMTU2OCcgeGxpbms6aHJlZj0nI2c1LTU5JyB5PSc3My45ODM1MTgnLz4KPHVzZSB4PScyNDQuNTY4MDA0JyB4bGluazpocmVmPScjZzUtMTEyJyB5PSc3My45ODM1MTgnLz4KPHVzZSB4PScyNDguODMwNzgyJyB4bGluazpocmVmPScjZzQtMTA1JyB5PSc3NS4xOTg1OTYnLz4KPHVzZSB4PScyNTEuOTkyNTM5JyB4bGluazpocmVmPScjZzMtMTA3JyB5PSc3NC45Nzk3ODInLz4KPC9nPgo8L3N2Zz4=) .
.
La mise à jour des positions se fait en appliquant les lois de la mécanique :

Tant que l’algorithme n’a pas convergé, on retourne à la première étape.
L’implémentation est réalisée dans le module corde.